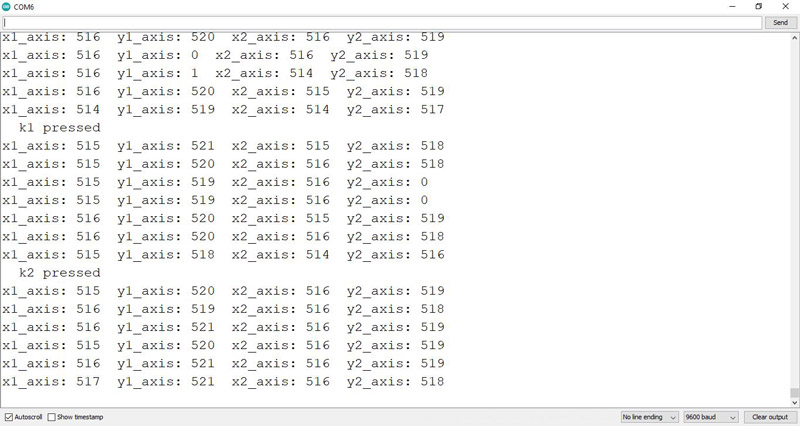
در این برنامه شما میتوانید به طور کامل عملکرد این ماژول را بررسی کنید. مقادیر چهار جهت X1، Y1، X2 و Y2 بر روی سریال مانیتور قابل مشاهده است. میتوانید با تغییر در وضعیت جویاستیک ها، تغییر مقادیر خروجی آنها را به راحتی مشاهده کنید. در ضمن با فشار هر یک از کلیدها، فشار دادن آن کلید در خروجی سریال مانیتور اعلام میشود.
به عکس زیر توجه کنید. برای مثال هر دو جوی استیک را ابتدا در خلاف جهت محور Y حرکت دادهایم و سپس سوئیچ هر کدام را فشار دادیم.