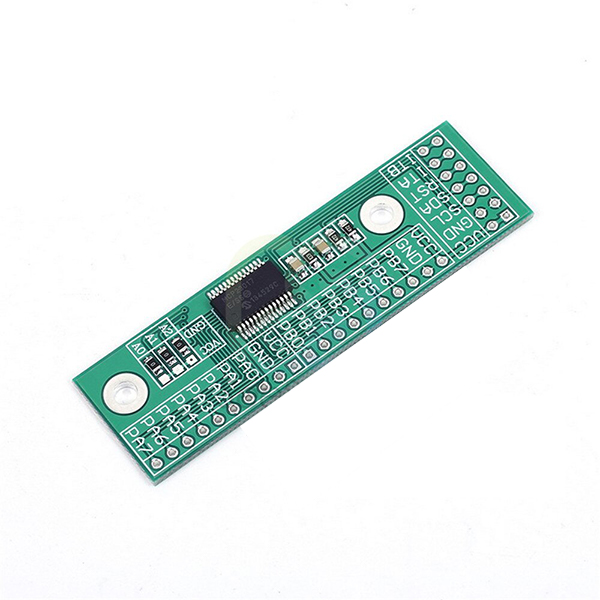
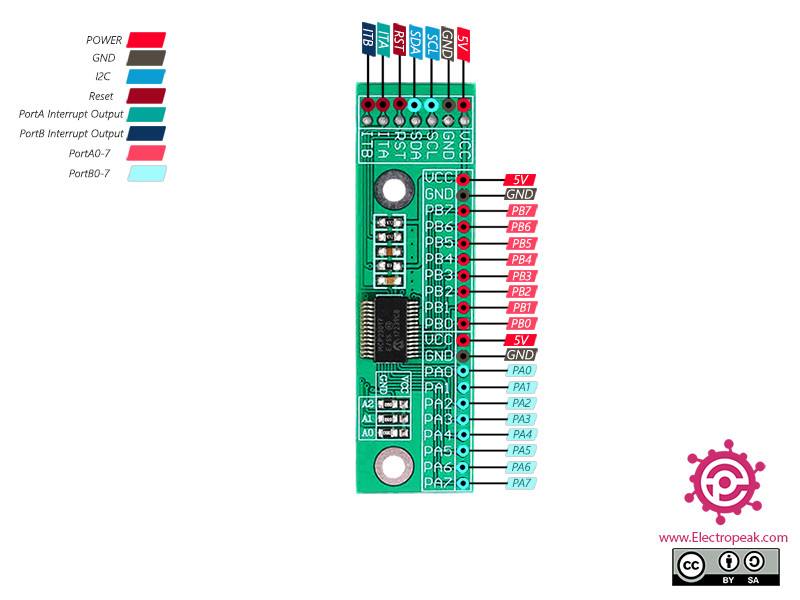
برد توسعه ورودی-خروجی 16 کاناله MCP23017-E/SS دارای 27 پایه به شرح زیر است:
7 پایه در سمت بالای برد:
- VCC: تغذیه ماژول –5 ولت
- GND: زمین
- SCL: پایه کلاک برای پروتکل I2C
- SDA: پایه دیتا برای پروتکل I2C
- RST: پایه ریست
- ITA: خروجی وقفه پورت A
- ITB: خروجی وقفه پورت B
20 پایه در سمت راست برد:
- VCC: تغذیه ماژول –5 ولت
- GND: زمین
- PB0-7: پایههای پورت B
- VCC: تغذیه ماژول –5 ولت
- GND: زمین
- PA0-7: پایههای پورت A
پین اوت (Pinout) این ماژول را میتوانید در تصویر زیر مشاهده کنید.