امروزه کنترل سرعت و جهت موتورهای DC به علت کاربردهای فراوان، از اهمیت زیادی برخوردار است. یکی از روشهای کنترل موتورهای DC استفاده از مدار تمامپل Full-Bridge است. این ماژول نیز یک درایور موتور Full-Bridge با قابلیت عبور جریان بالا میباشد. پینهای INA و INB و PWM برای کنترل سرعت و جهت چرخش موتور استفاده میشوند. پین CS نیز سنسور جریان این ماژول میباشد. این پین به ازای عبور هر آمپر جریان، 0.13 ولت تغییر میکند. ولتاژ ورودی موتورها بایستی بین 5.5 تا 16 ولت باشند. همچنین جریان مجاز پیوسته عبوری از آن 14 آمپر است.
دیتاشیت آی سی VNH2SP30 را می توانید از اینجا دانلود کنید.
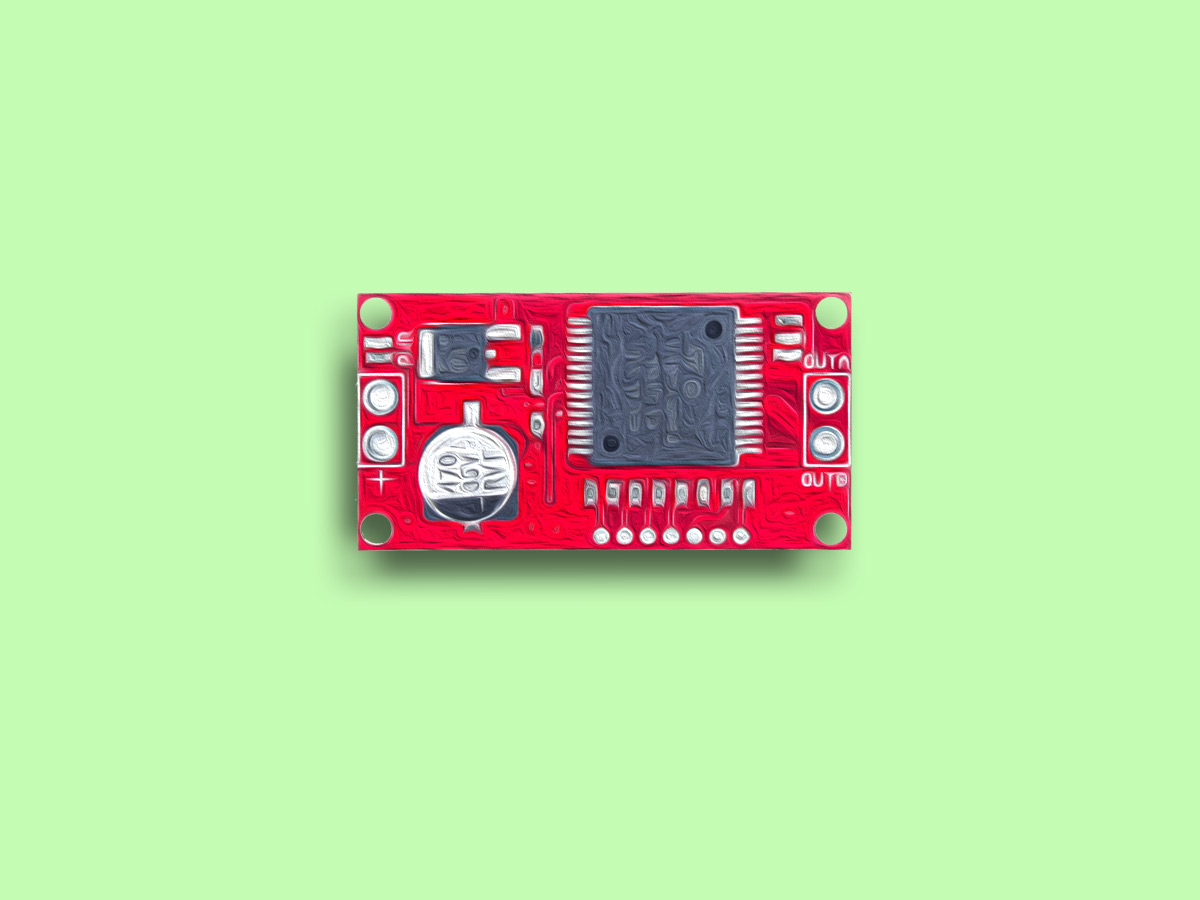
ماژول درایور موتور VNH2SP30 دارای 11 پایه به شرح زیر است:
VM: ولتاژ موتور
VCC: ولتاژ تغذیه ماژول
GND: زمین
A1: سر مثبت موتور
B1: سر منفی موتور
PWMA: سیگنال کنترل سرعت موتور A
INA: سیگنال کنترلی موتور
INB: سیگنال کنترلی موتور
CS: سنسور جریان ماژول
EN: پین فعالسازی ماژول
پین اوت (Pinout) این ماژول را می توانید در تصویر زیر مشاهده کنید.
نکته
این ماژول میتواند در سه وضعیت راستگرد، چپگرد و ترمز کار کند. اگر INA و INB هر دو روشن یا هر دو خاموش باشند، در وضیت ترمز است. اگر INA روشن و INB خاموش باشد، جهت چرخش ساعتگرد و اگر INA خاموش و INB روشن باشد، جهت چرخش، پادساعتگرد میباشد.
لوازمی که به آن احتیاج دارید
قطعات مورد نیاز
آردوینو UNO R3
×
1
ماژول درایور موتور تمامپل VNH2SP30
×
1
موتور DC ساده 6 ولت
×
1
پتانسومتر 10 کیلواهم
×
1
باتری 9 ولت کتابی
×
1
گیره باتری 9 ولتی بدون فیش
×
1
سیم جامپر نری-مادگی
×
1
سیم جامپر نری-نری
×
1
برد بورد 400 حفره ای
×
1
نرم افزارهای مورد نیاز
آردوینو IDE
راه اندازی ماژول درایور موتور تمامپل VNH2SP30 با آردوینو
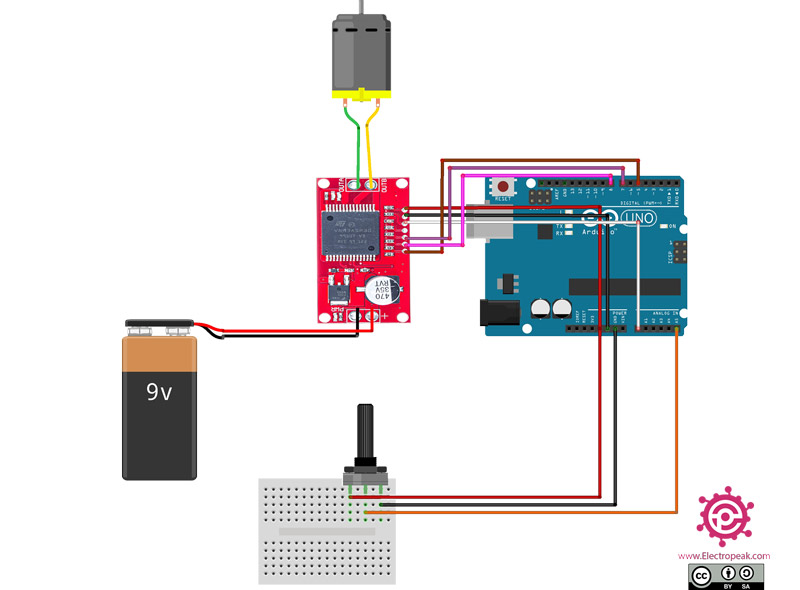
گام اول: سیم بندی
مطابق مدار زیر ماژول را به آردوینو و سایر قطعات وصل کنید.
گام دوم : کد
کد زیر را روی آردوینو خود آپلود کنید.
/*
VNH2SP30-full-bridge-Driver
made on 01 Nov 2020
by Amir Mohammad Shojaee @ Electropeak
*/
#define PWM 5
#define INA 7
#define INB 8
#define EN A0
int pot;
int out1;
void setup() {
Serial.begin(9600);
pinMode(PWM,OUTPUT);
pinMode(INA,OUTPUT);
pinMode(INB,OUTPUT);
pinMode(EN,OUTPUT);
}
void loop() {
digitalWrite(INA,HIGH); //Motor A Rotate Clockwise
digitalWrite(INB,LOW);
digitalWrite(EN,HIGH);
pot=analogRead(A5);
out1=map(pot,0,1023,0,255);
analogWrite(PWM,out1); //Speed control of Motor
}
برنامه بالا برای کنترل سرعت یک موتور DC میباشد. با چرخاندن پتانسیومتر سرعت موتورها در جهت عقربه های ساعت زیاد میشود. در ضمن برای فعالسازی ماژول بایستی پین EN را HIGH کنید.
هشدار
دقت کنید به دلیل اینکه موتورهای شما 6 ولت میباشد، پتانسیومتر را تا انتهای آن نچرخانید. زیرا مقدار ولتاژ ورودی 9 ولت است و ممکن است به موتور آسیب برسد. البته میتوانید از باتری با ولتاژ پایین تر یا از موتوری با ولتاژ بالاتر استفاده کنید.