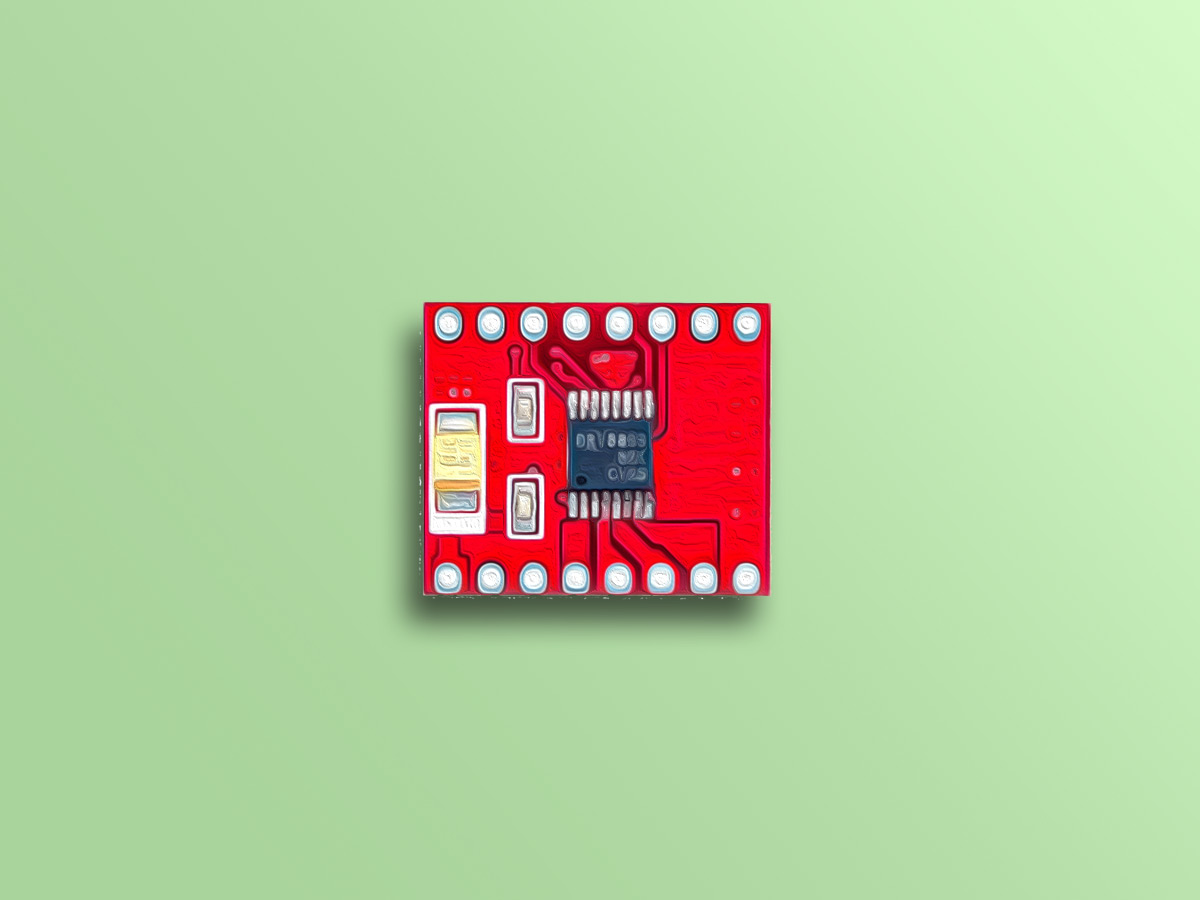
ماژول درایور موتور دو کاناله DRV8833 دارای 16 پایه به شرح زیر است:
- VM: ولتاژ موتور
- GND: زمین-در این ماژول سه زمین داریم که به یکدیگر متصل اند.
- AO1: سر مثبت موتور A
- AO2: سر منفی موتور A
- BO1: سر مثبت موتور B
- BO2: سر منفی موتور B
- AIN1: سیگنال کنترلی موتور A
- AIN2: سیگنال کنترلی موتور A
- BIN1: سیگنال کنترلی موتور B
- BIN2: سیگنال کنترلی موتور B
- STBY: برای فعال شدن وضعیت Standby بایستی این پین HIGH شود.
- NC: پایههای بدون استفاده
پین اوت (Pinout) این ماژول را میتوانید در تصویر زیر مشاهده کنید.






Comments (2)
سلام در مقاله اشاره شده که این ماژول PWM نداره در حالی که از PWM پشتیبانی میشه. البته با این کد نه.
با سلام،
ممنون از نظر خوبتون توضیحات اصلاح شد.