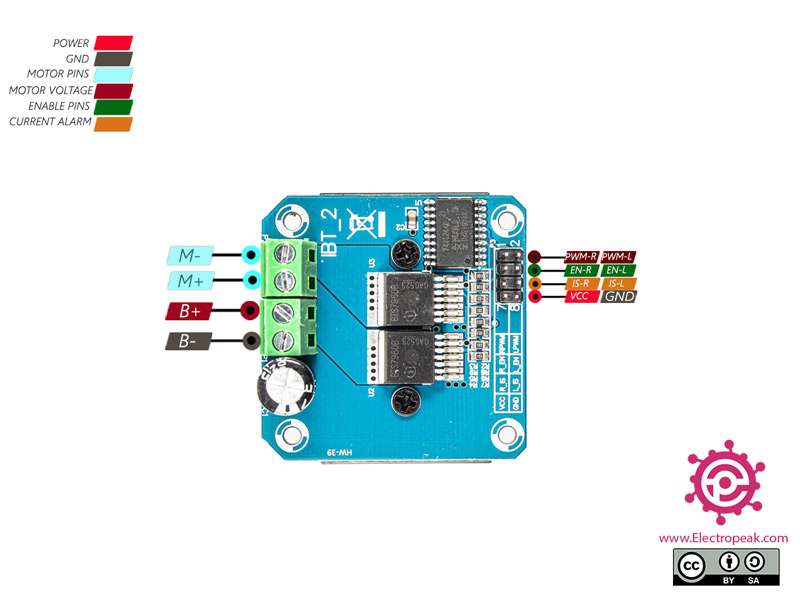
ماژول BTS7960 دارای 12 پایه به شرح زیر است:
بخش مرتبط به میکروکنترلر(جریان پایین):
- VCC: تغذیه ماژول 5 ولت
- GND: زمین
- IS-R: سیگنال ورودی تشخیص جریان بالا – چرخش مستقیم
- IS-L: سیگنال ورودی تشخیص جریان بالا – چرخش معکوس
- EN-R: سیگنال خروجی برای کنترل جهت موتور – چرخش مستقیم
- EN-L: سیگنال خروجی برای کنترل جهت موتور – چرخش معکوس
- PWM-R: سیگنال PWM خروجی برای کنترل سرعت موتور – چرخش مستقیم
- PWM-L: سیگنال PWM خروجی برای کنترل سرعت موتور – چرخش معکوس
بخش مرتبط به موتور (جریان بالا):
- M+: سر مثبت موتور
- M-: سر منفی موتور
- B+: سر مثبت منبع تغذیه
- M+: سر منفی منبع تغذیه
پین اوت (Pinout) این ماژول را میتوانید در تصویر زیر مشاهده کنید.



Comments (6)
من نیاز دارم که از سرعت و جهت از طریق خود آردوینو قابل تغییر باشد و نه از طریق پتانسیومتر دستی، یعنی آردوینو بتواند بر اساس خروجی یک سنسور خودش جهت و سرعت موتور را تنظیم کند، آیا میتوان بدون استفاده از پتانسیومتر دستی اینک عملیات را انجام داد؟
با سلام
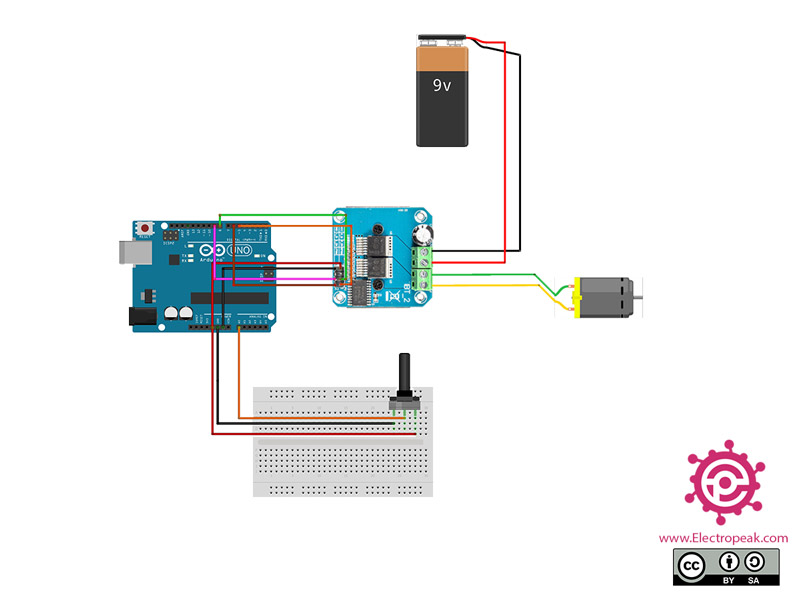
این یک مثال می باشد که مقادیر از طریق پتانسیومتر خوانده می شود و توسط دستور analogWrite(RPWM,out1); به درایور اعلام میشود.
شما به جای متغییر out1 هر متغییری که میخواهید قرار بدهید و پر کردن این عدد بین 0 الی 255 می توانید سرعت موتور مورد نظر را تغییر بدهید.
در مورد جهت حرکت نیز دقت کنید داخل کد به چه صورت از دستور analogWrite استفاده می شود و همان را انجام بدهید می توانید جهت را تنظیم کنید.
سلام
آیا این ماژول برای راه اندازی ماژول درایور موتور 43 آمپر BTS7960
با RC یعنی با گیرنده رادیو کنترل ۷ کاناله
قابل کنترل هست.؟
نمیخوام وارد مقوله برنامه نویسی بشم
با احترام
با سلام
خیر، نیاز به میکرو دارید چون باید چپ گرد و راست گرد را مشخص بکنید و در ادامه با PWM بهش دستور بدهید. سبگنال های RC یک مقدار با PWM درایور موتور فرق میکند.
حتما باید برنامه نویسی بکنید یا فلایت کنترل قرار بدهید
سلام از جوابتون متشکرم
لطفا نام ماژول های لازمه را برام بنویسید یا معرفی کیند که خرید کنم . با احترام
از هر مدل میکروکنترلی برای این موضوع میتوانید استفاده بکنید.
مانند Arduino, ESP32, ESP8266, STM
برای تک تک این محصول ها آموزش راهاندازی اولیه از طریق برنامه Arduino IDE نیز قرار داده شده است.