جریان و میدان مغناطیسی ارتباط مستقیمی با یکدیگر دارند. زمانی که جریان در یک سیم جاری می شود (الکترون ها در یک جهت شروع به حرکت می کنند)، میدان مغناطیسی ایجاد می شود. ایده ی اصلی سنسور های قطب نما هم بر اساس همین رابطه است. جهت میدان مغناطیسی زمین روی جریان حرکت الکترون ها در سنسور تاثیر می گذارد. با اندازه گیری این تغییرات در جریان، سنسور قادر خواهد بود تا جهت ها را تشخیص دهد.
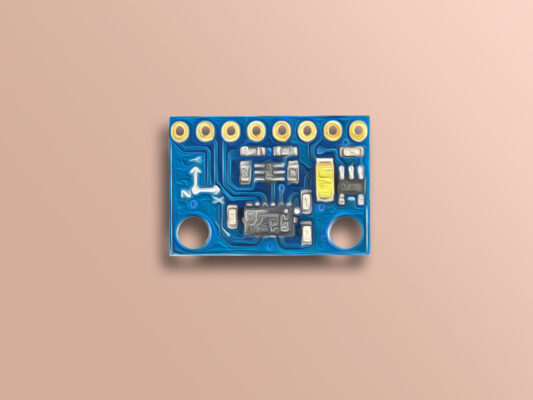
ماژول GY-511 از تراشه ی LSM303DLHC برای تشخیص میدان های مغناطیسی و جهت آن ها استفاده می کند. پروتکل ارتباطی این ماژول I2C است و می توانید با استفاده از 2 پایه SCL و SDA آن را به پردازنده های مختلف از جمله بردهای آردوینو متصل کنید.