
جهت دریافت دیتاشیت ماژول فشار بارومتریک BMP280 به همراه شتاب سنج 9 محوره MPU9250 اینجا کلیک کنید.

جهت دریافت دیتاشیت ماژول فشار بارومتریک BMP280 به همراه شتاب سنج 9 محوره MPU9250 اینجا کلیک کنید.

Comments (2)
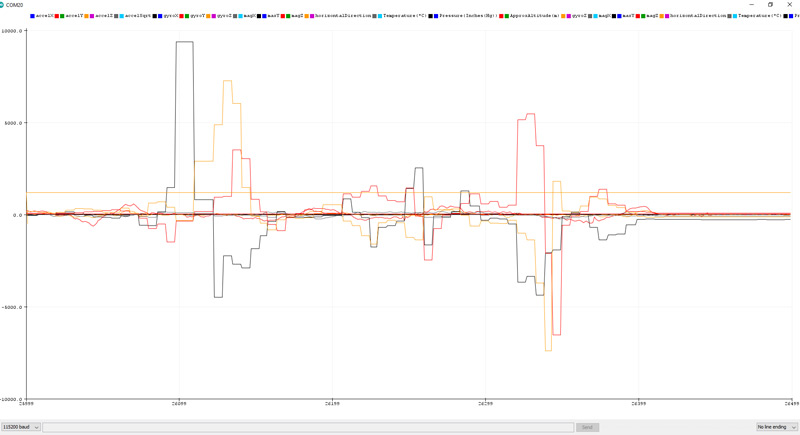
سلام . دقیقا مطابق آموزش بالا ماژول gy-91 رو راه اندازی کردم.متاسفانه فقط دو تا از پارامترهای اول (accelX-
accelY) توسط ماژول اندازه گیری میشن و مابقی ثابتن… – از کتابخانه های دیگه و حتی در حال spi و علاوه بر آردینو روی esp32 هم چک کردم نتیجه همون شد. چقدر احتمال داره که ماژول خراب باشه؟؟؟
sensorId: 112
accelX: -3.37
accelY: 3.14
accelZ: -16.00
accelSqrt: 16.65
gyroX: 0.00
gyroY: 0.00
gyroZ: 0.00
Cannot read mag values
سلام. بله احتمالش هست که مشکل از خود ماژول باشه. در صورتی که مشکل از کد، اتصالات و یا عوامل دیگه باشه هیچکدوم از پارامترها صحیح نوشته نمیشن.