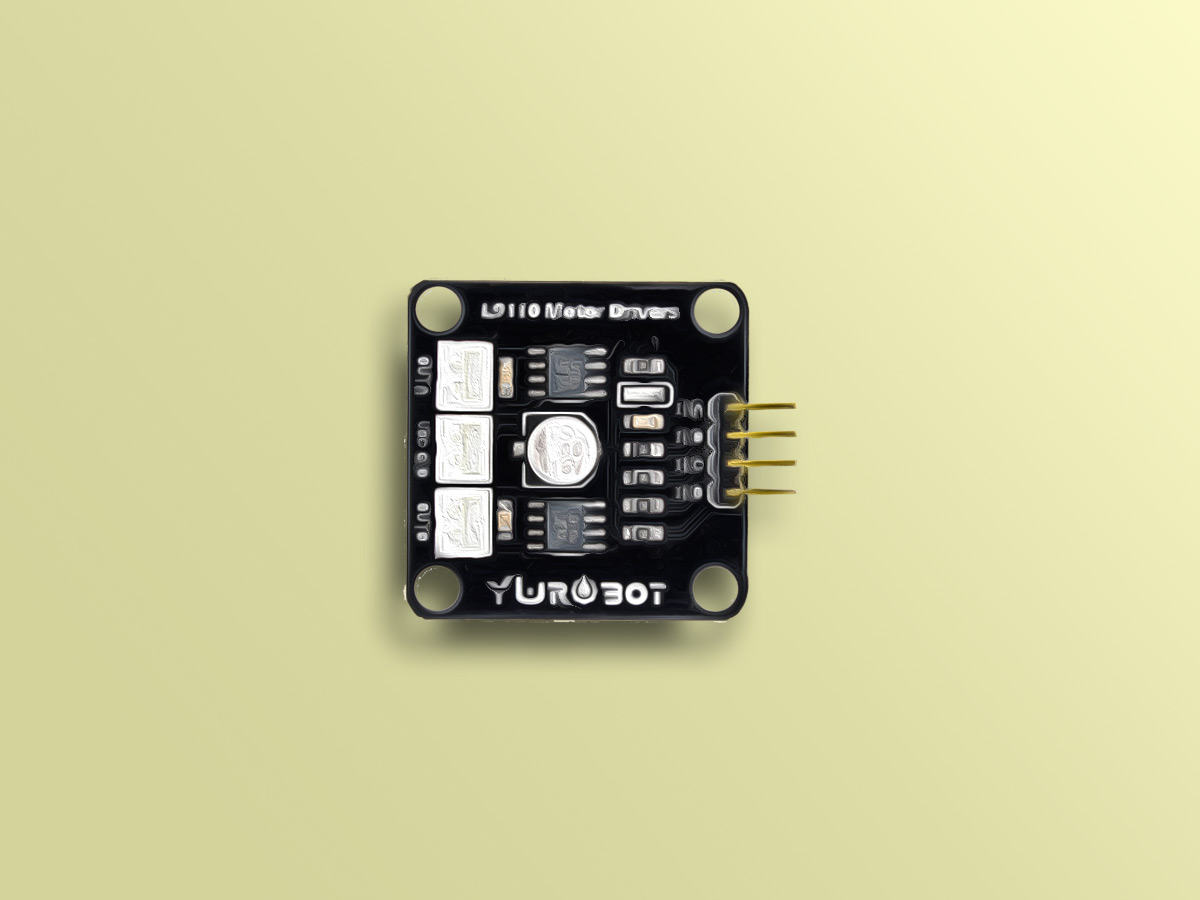
موتورهای DC یکی از پرکاربرد ترین قطعات در رباتیک و الکترونیک میباشند. ماژولهای مختلفی برای کنترل موتور DC وجود دارد. یکی از این ماژولها که میتواند همزمان دو موتور DC را کنترل کند، ماژول درایور دو کاناله بر پایه آیسی L9110 میباشد. از جمله ویژگیهای این ماژول میتوان به موارد زیر اشاره کرد:
جریان مجاز پیوسته عبوری برای هر کانال 800 میلیآمپر میباشد.
ولتاژ کاری این ماژول 2.5 تا 12 ولت است.
دارای دو پین کنترل برای هر موتور DC
قابلیت استفاده در موتورهای ماشین اسباب بازی
قابلیت کنترل یک عدد استپر موتور
نکته
از این ماژول فقط میتوان برای کنترل جهت چرخش موتورهای DC استفاده کرد.
دیتاشیت آی سی L9110 را می توانید از اینجا دانلود کنید.