

دیتاشیت درایور TB6600 را میتوانید از اینجا دانلود کنید.


دیتاشیت درایور TB6600 را میتوانید از اینجا دانلود کنید.

Comments (4)
تنظیم استپ برای مدل 4.5 امپر اشتباه هست تنظیمات در پشت برد درایور نوشته شده.
سلام.
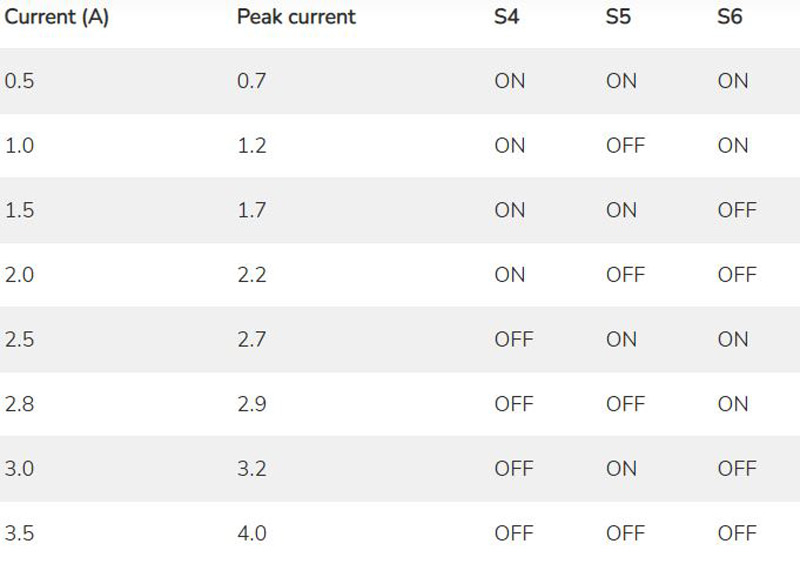
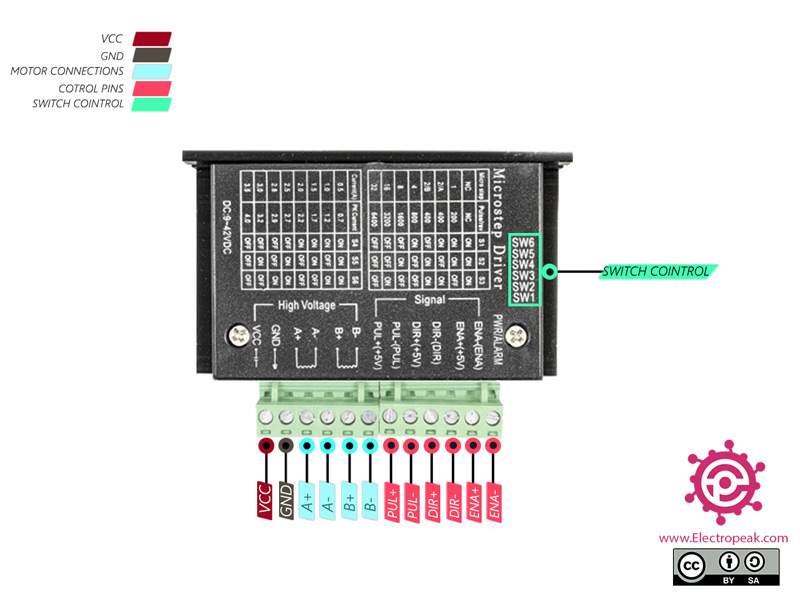
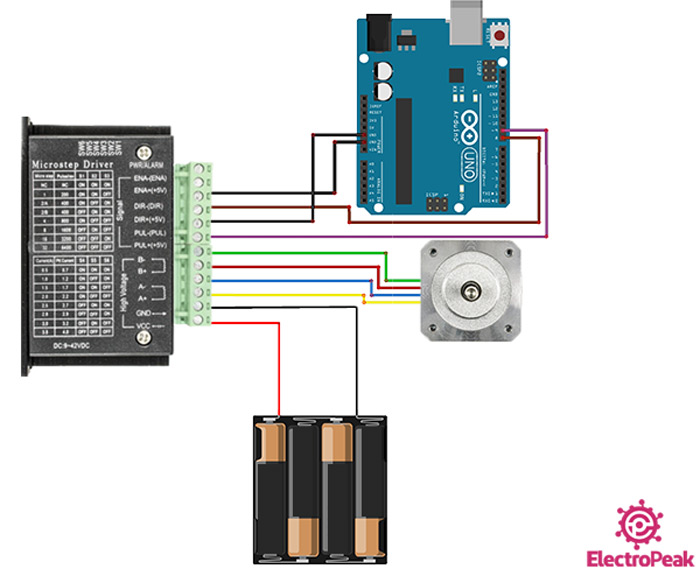
نه، تنظیمات صحیح هست. این تنظمیاتیه که در انتهای آموزش بهش اشاره شده: “ابتدا S1 و سپس S2 را Off میکنیم. با این کار گام درایور در مدل 4 آمپری ابتدا 1/8 و سپس 1/32 میشود. در نتیجه با افزایش گام، سرعت موتور کاهش و رزولوشن آن افزایش مییابد. در مدل 4.5 آمپری نیز گام درایور ابتدا 1/8 میشود و سپس با توجه به اینکه گام 1/32 ندارد، میایستد.” شاید دلیل اینکه حس کردید ایرادی در تنظیمات وجود داره اینه که توجه نکردید که S3، از قبل Off هست. در همان قسمت سیمبندی اشاره شد که برای اینکه موتورها در گام کامل قرار بگیرن، S3 در حالت Off قرار میگیره. در انتهای آموزش هم که تغییرات صورت میگیره، S3 همچنان Off میمونه و با توجه به این، تنظیماتی که نوشته شده، درست هست.
سلام
ببخشید من یه استپرموتور 15 درجه دارم که میخواستم با درایور TB6600 و آردوئینو راه اندازیش کنم. راه اندازی کردم ولی حرکتش رو هنوز نتونستم تحت کنترل در بیارم.
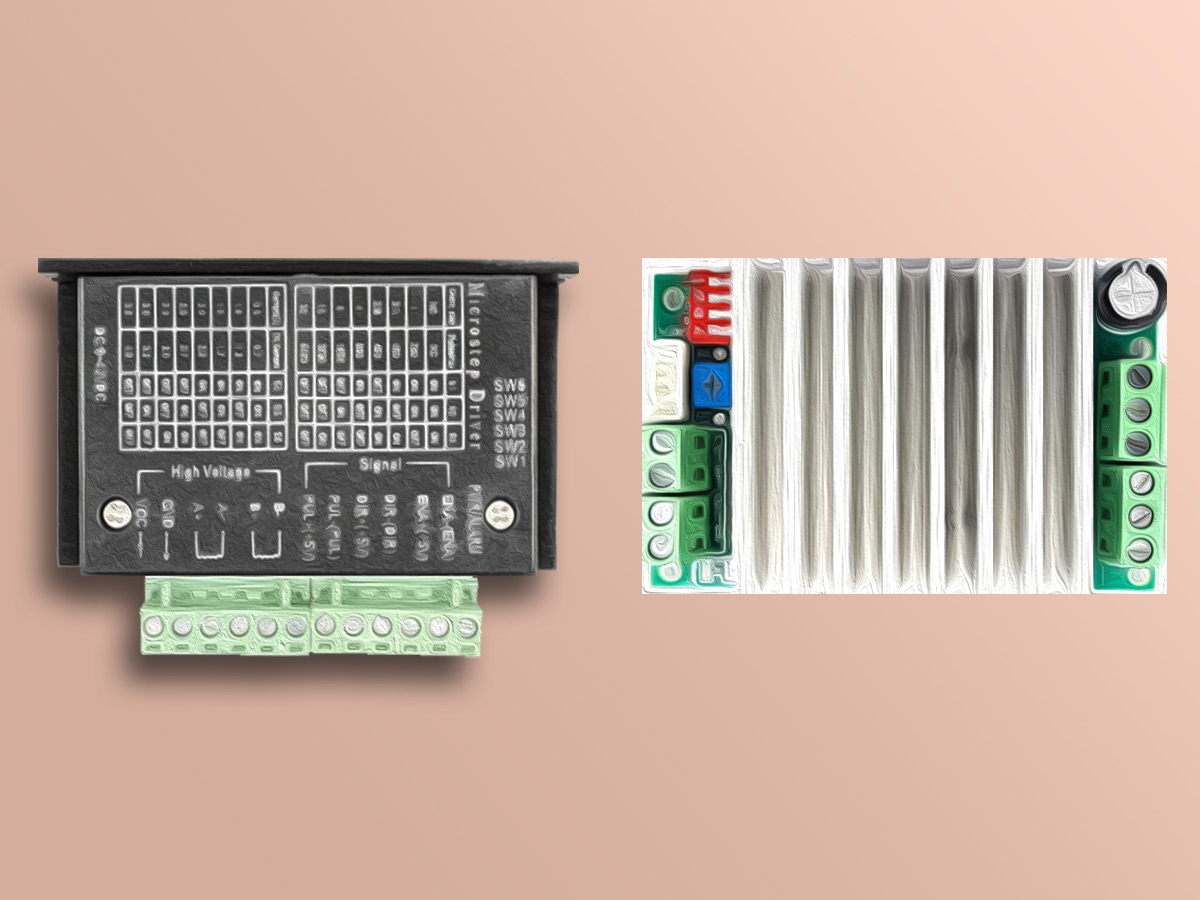
این شک تو دلم افتاده که نکنه این درایور برای این موتور مناسب نیست چون شماره Microstep از 200 شروع شده.
نظر شما چیه؟
سلام وقت بخیر
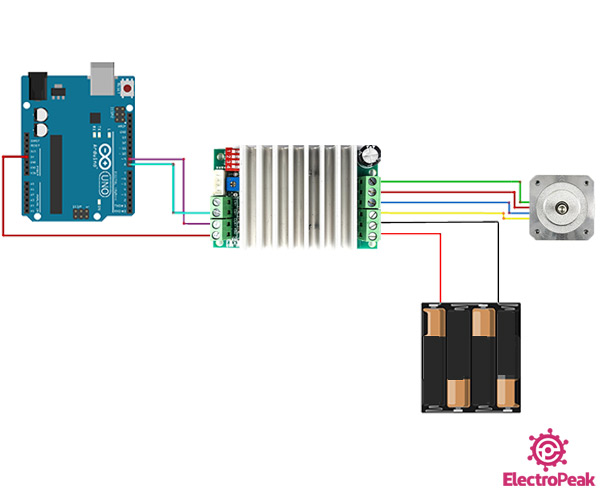
شما باید مقدار ستپ رو تغییر بدید ، موتور شما 24 استپه ظاهرا
بنده این طور متوجه شدم. در لایبراری step یک ماکرو وجود داره که مقدار step رو میتونید تعیین کنید
در این کد ظاهرا پیش فرض مقدار 200 step تعیین شده