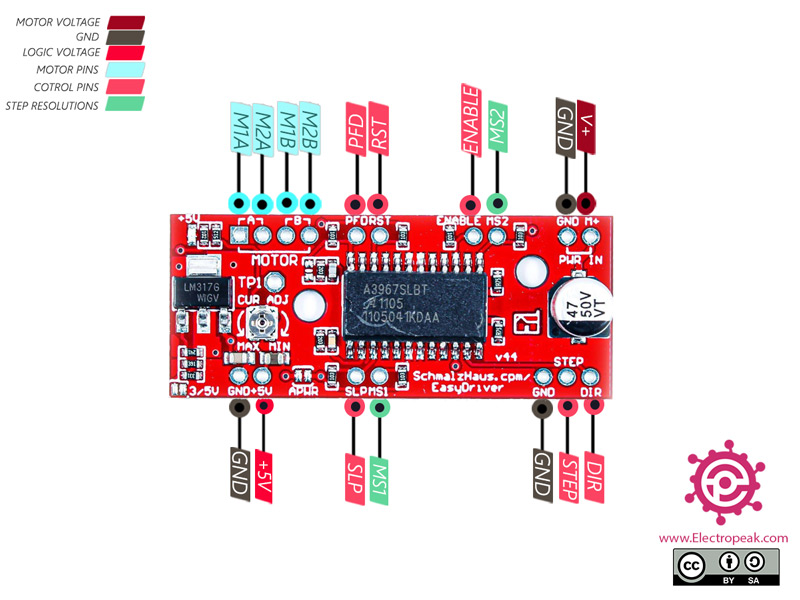
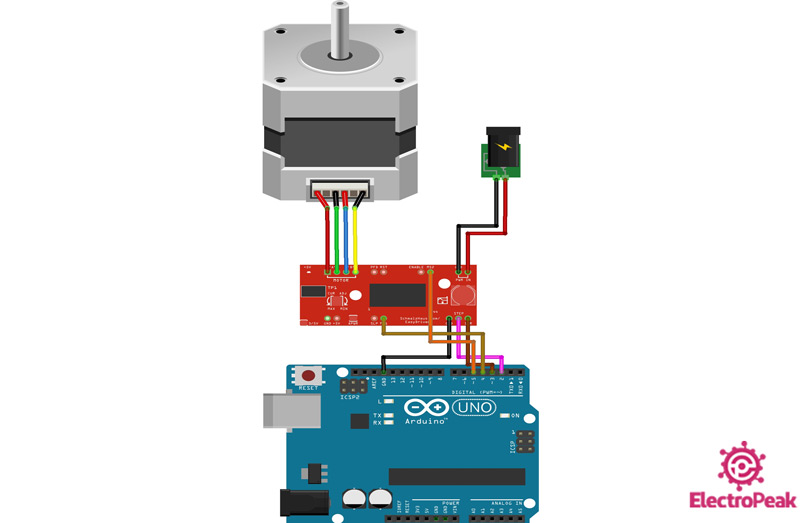
اگر در انجام پروژههای خود از استپر موتور استفاده میکنید، قطعا به کنترلکننده آن نیاز پیدا میکنید. یکی از درایورها برای کنترل استپر موتورها، درایور EasyDriver میباشد. این ماژول بر مبنای آیسی A3967 میباشد. این ماژول برای کنترل استپر موتورهای دو قطبی استفاده میشود.
ویژگیهای این ماژول عبارت اند از:
- جریان مجاز پیوسته عبوری: 0.750 آمپر
- ماکزیمم جریان مجاز عبوری: 0.850 آمپر
- حداکثر ولتاژ مجاز: 30 ولت
- محافظ حرارتی
- حفاظت جریان زیاد
- دارای پتانسیومتر جهت محدود کردن جریان



Comments (2)
سلام
با تشکر از مطالب خوبتون
اگر امکان دارد در خصوص برنامه ریزی آردینو به طوری که از طریق کامپیوتر و پایتون قابل کنترل باشد و همچنین حلقه بسته کردن موتور و آردینو راهنمایی بفرمایید
سلام. ممنون از لطف شما.
امکان برنامه ریزی آردوینو با پایتون وجود نداره ولی جدیدا زبان برنامه نویسی جدیدی تحت پایتون برای میکروکنترلرها طراحی شده به اسم میکروپایتون. برخی از میکروکنترلرها مثل برخی میکروکنترلرهای STM32، تمامی میکروکنترلرهای سری ESP32 و ESP8266 و برخی دیگر میکروکنترلرها توانایی برنامه نویسی به زبان میکروپایتون رو دارن. میتونید برای یادگیری نحوه برنامه نویسی میکروکنترلرها با زبان میکروپایتون از آموزشهای زیر استفاده کنید.
https://thecaferobot.com/learn/micropython-programming-tutorial-w-esp8266/
https://thecaferobot.com/learn/getting-started-with-micropython-on-esp32-a-full-beginners-guide/
در رابطه با حلقه بسته کردن موتور و آردوینو هم، اگر منظورتون کنترل کردن سرعت موتور با گرفتن فیدبک از اون هست، لازمه که از انکودرها استفاده کنید. با دادن خروجی انکودر به آردوینو، سرعت موتور رو محاسبه میکنید و بر اساس اون میتونید سرعت موتور رو با کم یا زیاد کردن کنترل کنید. در رابطه با استفاده از انکودرها هم آموزشهای زیر میتونن براتون مفید باشن.
https://thecaferobot.com/learn/how-to-interface-a-rotary-encoder-with-arduino/
https://thecaferobot.com/learn/interfacing-lm393-infrared-speed-sensor-with-arduino/
https://thecaferobot.com/learn/interfacing-photoelectric-encoder-speed-sensor-with-arduino/