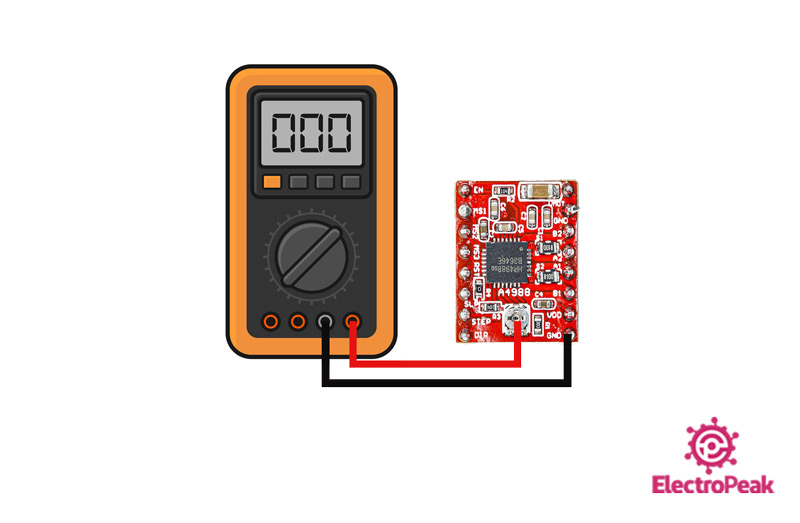
قبل از اتصال موتور، بایستی محدویت جریان درایور را اعمال کنیم تا مطمئن شویم این جریان به درایور و موتور آسیب نمیزند. این جریان از طریق اندازه گیری ولتاژ مرجع پتانسیومتر مانند فرمول زیر اندازه گیری میشود. هرچند نمیتوان گفت که این رابطه همواره برقرار است.
Current Limit = VRef * 2
ابتدا سر مثبت مولتیمتر را به پتانسیومتر و سر منفی مولتیمتر را به GND متصب کنید. ولتاژی که اندازهگیری شده است، همان VRef میباشد. با ضرب آن در عدد 2، محدودیت جریان مشخص میشود. در ادامه نیز با توجه به دیتاشیت، جریان کویلها 70% جریان محدود شده میباشد:
Winding Current = Current Limit * 0.7


Comments (9)
سلام
کدنویسی برای ماژول درایور tb6560 نیز چه تفاوت های دارد
سلام،
تفاوت اصلی که بین درایور tb6560 و a4988 وجود داره اینه که تو درایور tb6560 نیازی ندارید که حتما با کمک یک مولتیمتر محدودسازی جریان رو انجام بدید و این کار به کمک میکروسوییچ روی ماژول درایور به راحتی انجام میشه. تفاوت اصلیشون در استفاده با آردوینو هم به طور اجمالی این هست که به جای 2 پین، برای استفاده درایور tb6560 نیاز هست که از 3 پین آردوینو کمک گرفته بشه. برای شناخت بهتر استفاده از ماژول درایور tb6560 و استفاده اون با آردوینو میتونید از لینک زیر هم کمک بگیرید:
“https://www.youtube.com/watch?v=g-xnanD7vUs”
سلام میشه کدنویسی هارو توضیح بدین ک هر خط مربوط ب چی هست و ترتیب ب چ صورته
با سلام
کد کامنت گذاری شد.
ممنون از سایت خوبتون لطف کنید و شبیه سازی پروتئوس رو قرار بدید
درود
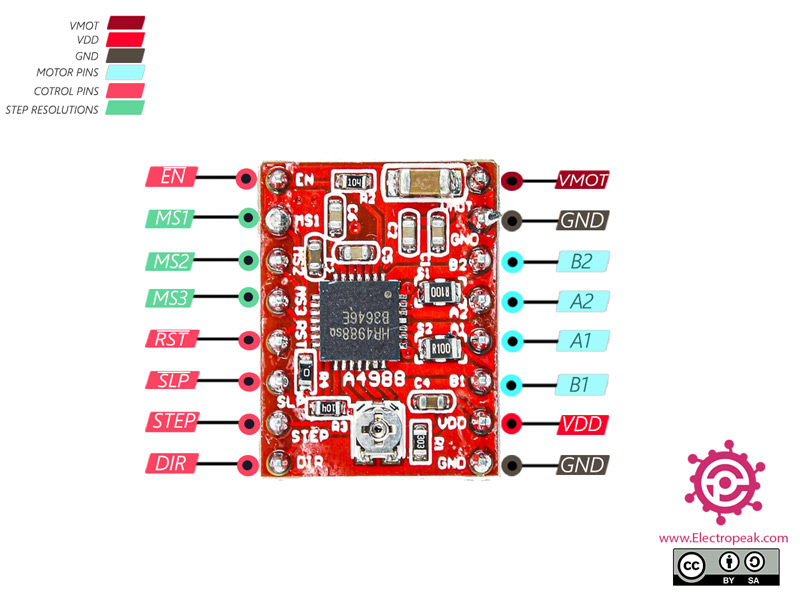
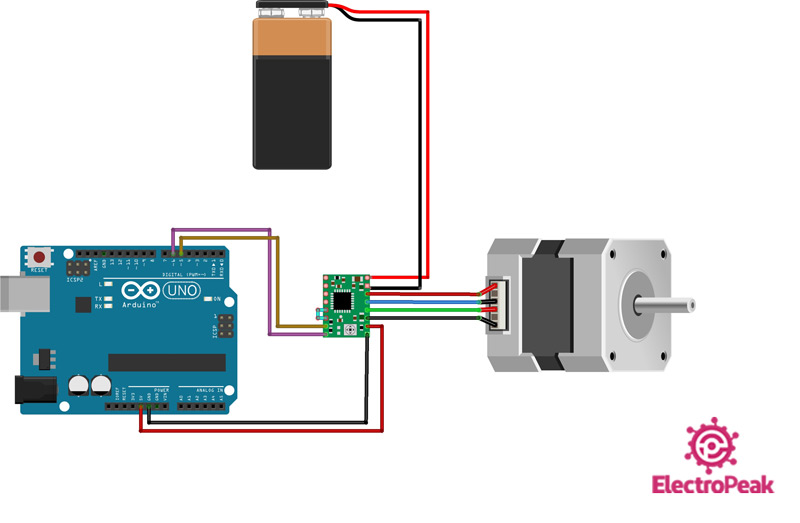
پایه های سیمپیچی موتور:
1A: پایه اول کویل 1 موتور
2A: پایه دوم کویل 1 موتور
1B: پایه اول کویل 2 موتور
2B: پایه دوم کویل 2 موتور
این اطلاعاتی که در باره پایه ها گذاشتید غلط هستند.
درستش اینشکلیه
1A&1B مربوط به سیم پیچ شماره یک و
2A&2B مربوط به سیم پیچ شماره دو
کمی مطالعه قبل از انتشار مطلب آموزشی !!!!!
با سلام
ممنون از اطلاع رسانی شما.
مطلب اصلاح شد.
سلام
خیلی ممنونم سایتتون خیلی مفیده
فقط اگه امکان داره راه اندازی موتور براشلس با اردویینو و ریموت irرو هم بزارید
این پروژه رو من هیچ جایی ندیدم همه جارو هم سرچ کردم متاسفانه نیست که نیست
با سلام
این آموزش که درخواست داده اید ترکیب 2 عدد از آموزش ها می باشد و ترکیب کردن آموزش ها اکثرا انجام نمیشود و با توجه به دانشی که از 2 آموزش بدست آورده اید می توانید پروژه مورد نظر خود را اجرا نمایید.