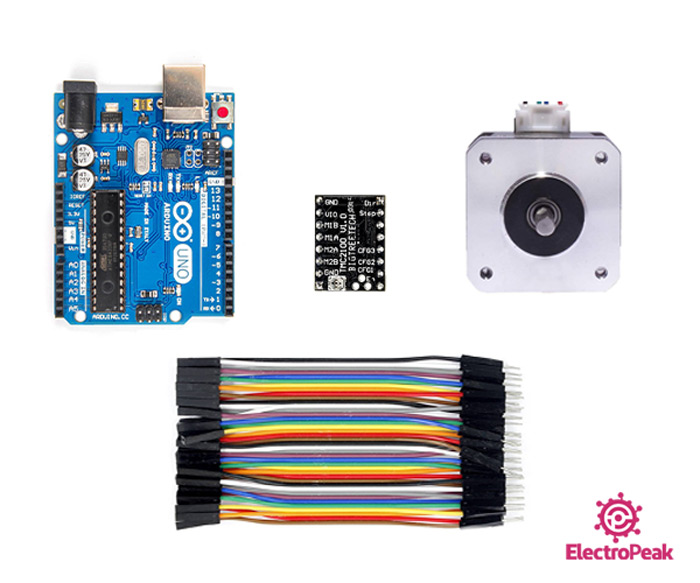
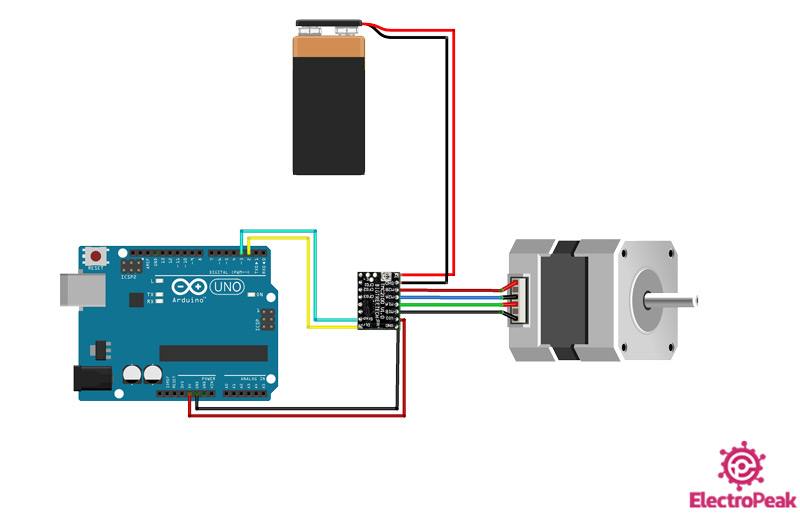
دقت کنید برای راهاندازی این موتور توسط درایور TMC2100 به منبع تغذیه (آداپتور، باتری و ….) بالاتر از 5.5 ولت نیاز دارید. منبع تغذیه در لیست فوق ذکر نشده است. خودتان یکی از انواع آن را تهیه کنید.
در ضمن دقت داشته باشید که منبع تغذیه شما باید بتواند جریان کویلهای موتور را تامین کند.



Comments (2)
دیتاشیت اشتباهی گذاشتید.
سلام.
ممنون از توجه شما. اصلاح شد.