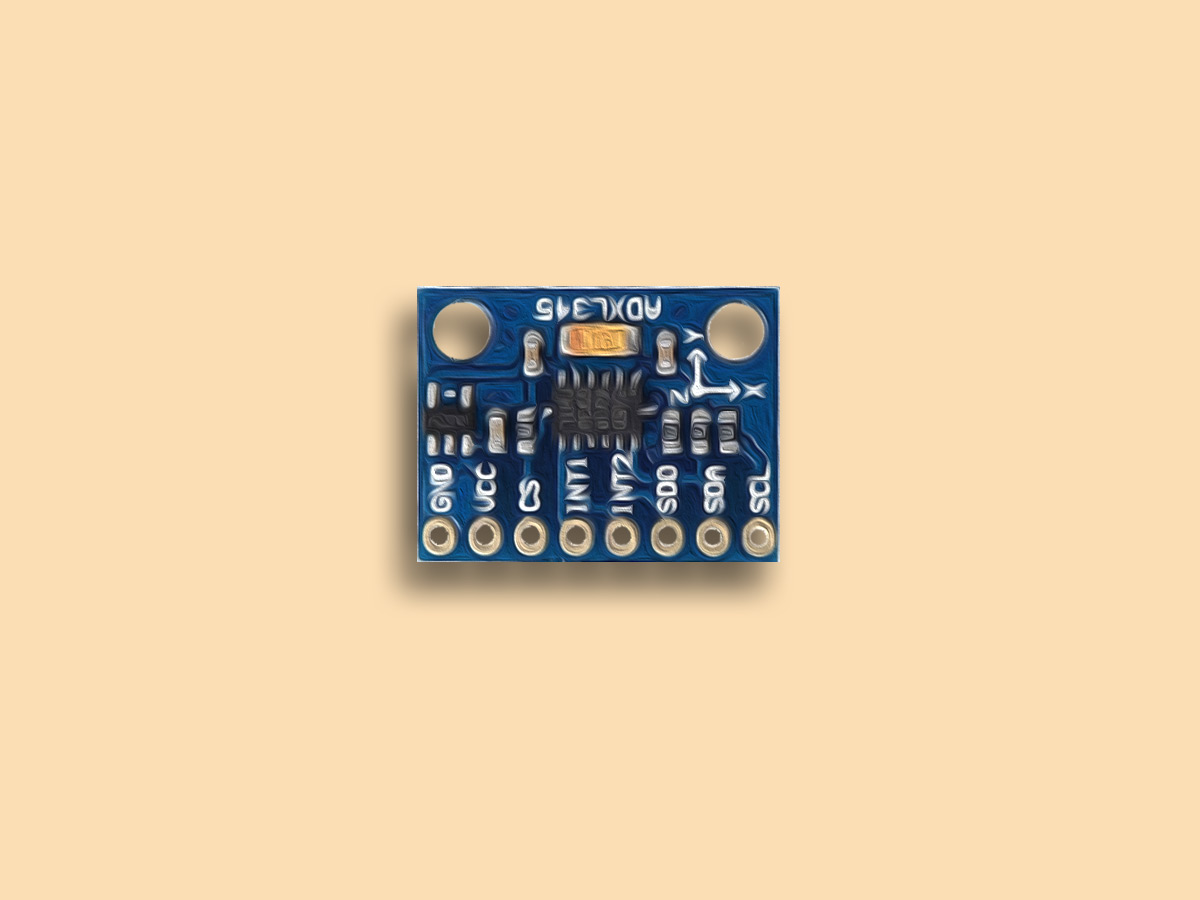
با استفاده از سنسور شتاب سنج ADXL345 میتوان جهتگیری زاویه و مسیر جسم مورد نظر را اندازهگیری کرد. این سنسور در سه جهت y ،x و z این عمل را انجام میدهد. این سنسور همچنین قادر به اندازهگیری نیروی شتاب دینامیک و استاتیک است. نیروی شتاب دینامیک بر اثر حرکت و لرزش و نیروی شتاب استاتیک به علت جاذبه زمین رخ میدهد. رنج حساسیت سنسور شتاب سنج ADXL345 از +-2g تا +-16g است. (g تقریبا برابر با 9.8 است.) برای مثال وقتی این سنسور بر روی یک سطح صاف قرار بگیرد، مقدار آن در جهت محور z، 1g+ و در جهت محورهای x و z، صفر است.
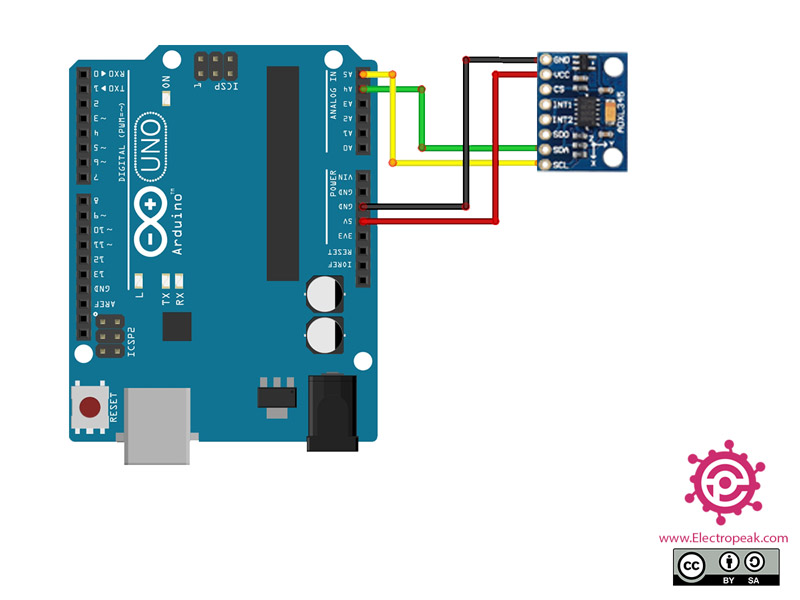
ارتباط این سنسور با میکروکنترلر میتواند از طریق دو پروتکل I2C و SPI باشد. رباتیک و رباتهای پرنده، دستگاههای جهتیاب، کنسول های بازی، ریموت کنترولرهای سه بعدی و … ازجمله موارد استفاده از این سنسور میباشد.



Comments (15)
سلام ممنون از اموش خوب وکاملتون
اگر بخواهیم این مقادیر به درجه نمایش داده بشن یعنی بین صفر تا 180درجه باشن باید چکار کنیم؟
سلام. ممنون از لطف شما
زاویه یک بردار به صورت زاویه اون با یکی از محورهای مختصات تعریف میشه. فرمول زاویه یک بردار با محور x در یک فضای 3بعدی به شکل زیر هست:
cos2(alpha) = x2/(x2 + y2 + z2).
فرمول زاویه با هر کدوم از محورهای y و z هم با جایگزین کردن x2 در صورت کسر با y2 و z2 به دست میان.
عدد 2 در فرمولهای بالا توان هست.
امکانش هست یک کد سمپل بدین درمورد این موضوع
سلام
شما همین فرمول cos2(alpha) = x2/(x2 + y2 + z2). میتونید در داخل لوپ اصلی برنامه قرار بدید و خروجی هر محور رو در داخل این فرمول بزارید
در کامنت های قبلی آقای ملکی توضیح دادن
سلام کقتتون بخیر میشه در مورد چایه های اینتراپ این ماژول هم توضیح بدید که چه جوری کار میکنن و چه زمانی بک میشن؟
سلام ببخشید اگه بخوام نمودار های شتاب های بدست آمده رو برام رسم کنه باید چ کاری انجام بدم
خواهشمندم راهنماییم کنید
سلام
در خود ide آردوینو میتونید به جای serial print از تابع serial plot استفاده کنید و از منوی tools گرینه serial plotter رو بزنید که براتون نمودار رو نمایش بده
یا اینکه دیتاهای به دست اومده رو در خروجی serial print جمع آوری کنید و داخل excel ببرید و خودتون نمودارشو رسم کنید
اما اگر تغییرات رو real میخواهید ببینید همون serial plotter بدردتون میخوره
سلام وقت بخیر یه راهنمایی میخاستم
یه شتاب سنجی که رو لباس نصب بشه و در صورت عدم تحرک فرد آلارم بزنه
ممنون
با سلام
پروژه انجام نمیشود. در صورتی که سوال در مورد آموزش داشتید در خدمت هستیم.
من همه این کار ها رو انجام دادم ولی توی خروجی سریال به من 0 می ده
با سلام
ابتدا با استفاده از فایل I2C Scanner بررسی کنید که ماژول بر روی آدرس درستی می باشد ؟؟
من می زنم کد رو صفر می ده سریال مانیتور
با سلام
ابتدا با استفاده از فایل I2C Scanner بررسی کنید که ماژول بر روی آدرس درستی می باشد ؟؟
سلام
ممنون از آموزش مفیدتون.
مراحل را با دقت تا آخر انجام میدم. خروجی سنسور صفر صفر صفر برای مقادیر شتاب هست.
سه بار شتاب سنج adxl345 جدید تست کردم، با برد آردوینو اونو و نانو جدید هم تست کردم جواب نداد. یوتیوب چندتا ویدئو دیدم که گفته بودند حتما باید با لول کانورتر وصل کنم. این کار هم انجام دادم همچنان خروجی ها صفر هستند. ممنون میشم راهنمایی بفرمایید.
با سلام
ابتدا با استفاده از کد I2C اسکنر که در بخش مثال های آردوینو می باشد. بررسی کنید که آدرس ماژول به شما بر میگردد یا خیر. تا زمانی که آدرس را دریافت نکنید هیچ دیتایی نخواهید گرفت.
در صورتی که دیتا را دریافت کردید. سپس بررسی کنید که این آدرس با آدرسی که کتابخانه استفاده میکند یکی می باشد یا خیر.