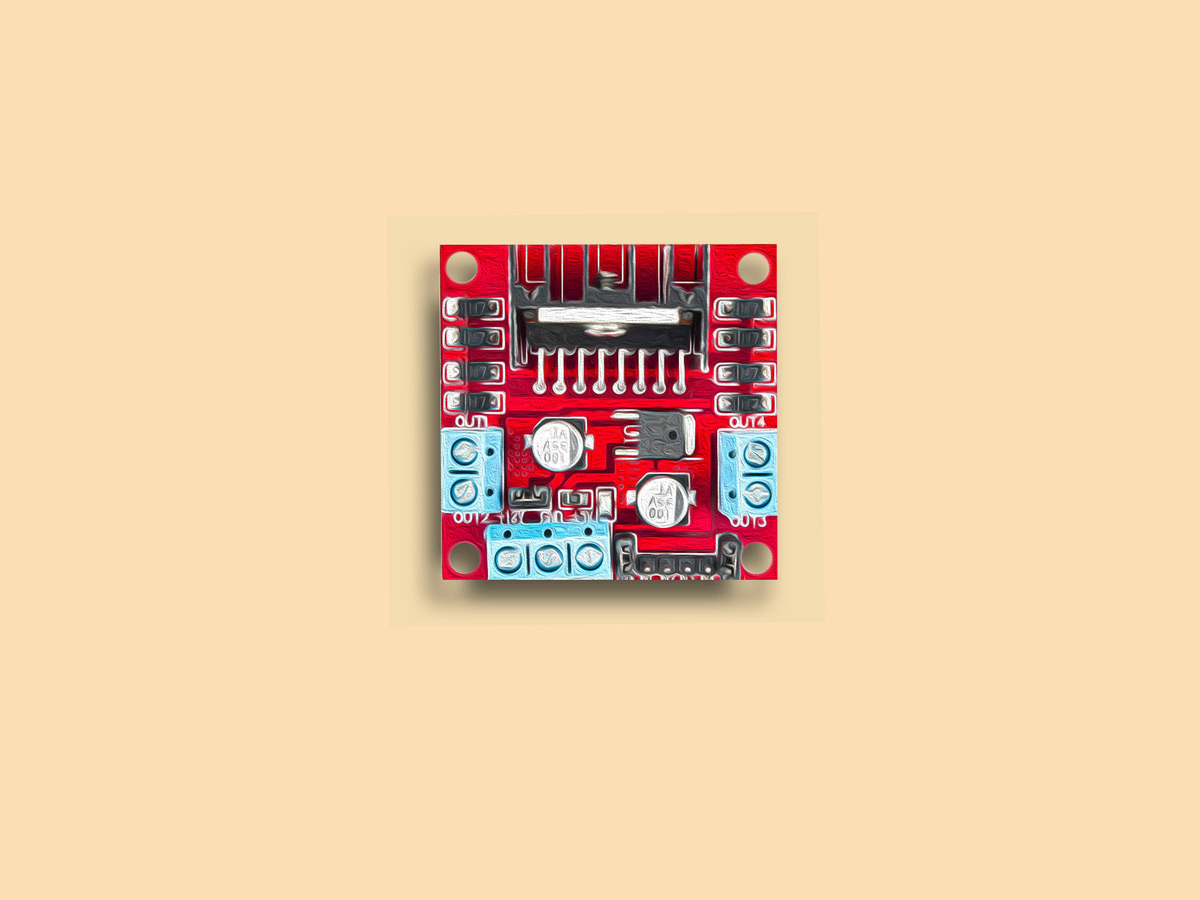
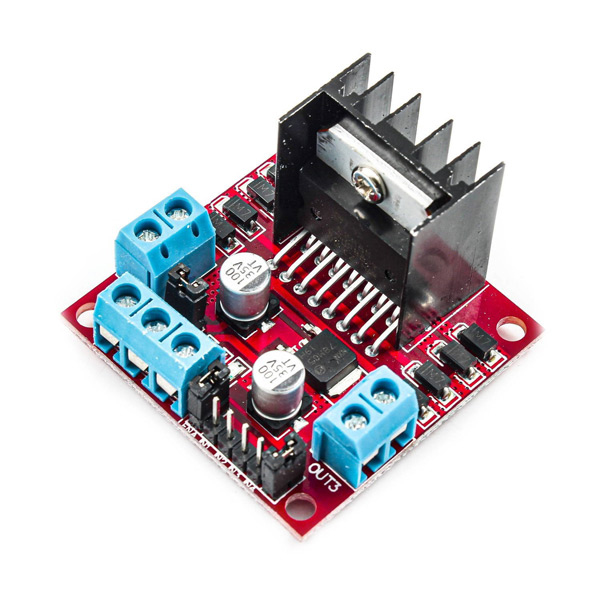
برای راه اندازی موتور های دی سی (DC) با جریان مصرفی کمتر از 2 آمپر، استفاده از آی سی درایور L298N گزینه مناسبی می باشد. ماژول درایور L298N با مدار فیلتر مناسب و دسترسی به ورودی و خروجی ها از طریق پین هدر و ترمینال، استفاده از این آی سی درایور را برای ما بسیار ساده تر کرده است.
L298N در واقع یک درایور فول بریج با دو نصفه پل (H-Bridges) است که امکان اتصال دو موتور دی سی را به صورت همزمان فراهم می کند.
توجه
در این ماژول به دلیل وجود 2 نصفه پل، امکان راه اندازی موتور های استپر نیز فراهم می باشد.
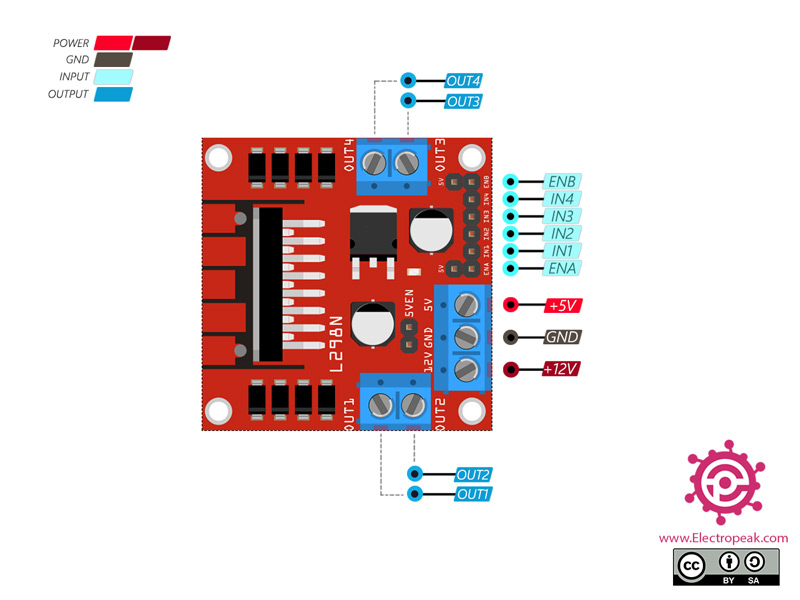
این درایور نیاز به یک منبع ولتاژ منطقی و یک منبع ولتاژ با جریان بالا برای تامین موتور ها دارد که این ماژول با استفاده از یک رگولاتور 5 ولت مشکل تامین ولتاژ منطقی را حل کرده است. پین های کنترلی این ماژول با ولتاژ 5 ولت عمل می کنند. در زیر به برخی از ویژگی های ماژول اشاره شده است.
ماکزیمم ولتاژ عملیاتی : 46 ولت دی سی
ماکزیمم جریان خروجی : 2 آمپر (3 آمپر در پیک جریان)
توان : 25 وات
سطح ولتاژ ورودی ها : 5 ولت
دمای کاری : -25 تا 130 درجه سلسیوس
نکته
در صورت قرار گرفتن بار زیاد روی موتور، دمای درایور به سرعت بالا می رود و با توجه به این که دمای کاری L298N بین -25 تا 130 درجه سلسیوس است، می بایست امکان خنک شدن هیت سینک فراهم شود.
دیتاشیت تراشه L298N را می توانید از اینجا دانلود کنید.
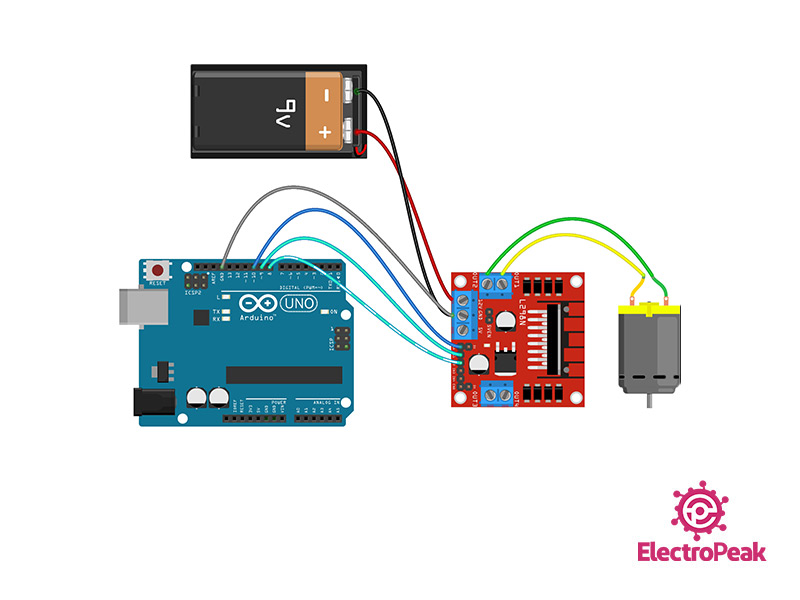
همانطور که در کد مشاهده می کنید موتور ابتدا 3 ثانیه در جهت جلو و 3 ثانیه در جهت عقب حرکت می کند. سپس موتور ایستاده و سرعت آن از 0 تا 100 درصد در جهت جلو با شتاب ثابت افزایش پیدا می کند و بعد همین حرکت موتور در جهت بر عکس انجام می شود.
سلام
اتصالات و تغذیه مدار رو چک کنید. همچنین اگر مولتیمتر دارید خروجی پایههای 8، 9 و 10 آردوینو رو هم چک کنید تا مطمئن شید برنامه به درستی داره کار میکنه. در صورتی که در این موارد مشکلی وجود نداشته باشه احتمالش هست که مشکل از درایور و یا خود موتور باشه.
شتاب و قدرت ابتدای حرکت موتور با این درایور به شدت کم میشه ،جوری که ماشین به سختی و با سرعت خیلی کم میتونه راه بره
ولی وقتی موتور رو به صورت مستقیم به منبع تغذیه وصل میکنم ماشین حتی روی فرش هم دریفت میزنه
چطوری میتونم این مشکل رو حل کنم؟
منبع تغذیه 12 ولت هست
با سلام
این که حرکت ضربه ای داشته باشید در لحظه اول باید باید حداکثر PWM را به ماژول بدهید و این نکته را نیز داشته باشید ولتاژ شما که میگویید 12 ولت هست. چند آمپرش را نیز ذکر کنید.
چون در صورتی که آمپر شما کم باشد این ماژول برای جلوگیری از آسیب رسین به سایر قطعه ها با توان پایین تر استارت میکند.
ولی وقتی که مستقیم وصل میکند این محافظت وجود ندارد و موتور حداکثر توانی را که بتواند از سمت منبع میگیرد.
نوع موتور شما نیز تعیین کننده می باشد. درصورتی که استارت موتور شما بیشتر از 2 آمپر باشد باید از درایور های قوی تری برای این موضوع استفاده کنید.
سلام خسته نباشید من وقتی منفی باتری رو به پایه GND ماژول وصل میکنم و وقتی هم سر مثبت باتری رو به پایه +12 وصل میکنم جرقه میزنه و برد روشن نمیشه با اینکه چراغ برد سالمه و هیچ چیزی به ماژول هم وصل نیست و تمام جا آمپر ها وصله و باتری ۷ ولت که جریان زیادی هم نداره هروی گشتم دنبال اینکه اتصالی در مدار باشه پیدا نکردم دیگه نمیدانم چه کار کنم این برد هم از خود کافه ربات خریدم نمیدانم مشکل چیه ؟
با سلام، در صورتی که در مدت تست یک هفته خود هستید درخواست مرجوعی خود را ثبت بنمایید.
همچنین با استفاده از یک مولتی متر پایه های VCC و GND روی برد را بررسی بکنید که بهم اتصال کوتاه دارند یا خیر. در صورتی که داشته باشند احتمالا برد مشکل دارد.
با سیم جامپر دوسر نری آزدوینو رو به پین های ورودی وصل کردید ؟ من فقط دوسر نری داریم اما برای این قطعه سر مادگی میخاد من میتونم با همین سیم هایی که دارم درست کنم؟
با سلام
در این شرایط سمت برد درایور موتور را باید پین هایش را به پین هدر نری خود هویه بکنید. در غیر این صورت نیاز به تهیه سیم جامپر مادگی به مادگی یا مادگی به نری تهیه بکنید.


Comments (10)
سلام
من دقیقا مثل آموزش پیش رفتم
موتورم روشن نمیشه
سلام
اتصالات و تغذیه مدار رو چک کنید. همچنین اگر مولتیمتر دارید خروجی پایههای 8، 9 و 10 آردوینو رو هم چک کنید تا مطمئن شید برنامه به درستی داره کار میکنه. در صورتی که در این موارد مشکلی وجود نداشته باشه احتمالش هست که مشکل از درایور و یا خود موتور باشه.
توضیحات بسیار عالی و کامل خیلی متشکرم از توضیحات عالیتون?
خواهش میکنیم
شتاب و قدرت ابتدای حرکت موتور با این درایور به شدت کم میشه ،جوری که ماشین به سختی و با سرعت خیلی کم میتونه راه بره
ولی وقتی موتور رو به صورت مستقیم به منبع تغذیه وصل میکنم ماشین حتی روی فرش هم دریفت میزنه
چطوری میتونم این مشکل رو حل کنم؟
منبع تغذیه 12 ولت هست
با سلام
این که حرکت ضربه ای داشته باشید در لحظه اول باید باید حداکثر PWM را به ماژول بدهید و این نکته را نیز داشته باشید ولتاژ شما که میگویید 12 ولت هست. چند آمپرش را نیز ذکر کنید.
چون در صورتی که آمپر شما کم باشد این ماژول برای جلوگیری از آسیب رسین به سایر قطعه ها با توان پایین تر استارت میکند.
ولی وقتی که مستقیم وصل میکند این محافظت وجود ندارد و موتور حداکثر توانی را که بتواند از سمت منبع میگیرد.
نوع موتور شما نیز تعیین کننده می باشد. درصورتی که استارت موتور شما بیشتر از 2 آمپر باشد باید از درایور های قوی تری برای این موضوع استفاده کنید.
سلام خسته نباشید من وقتی منفی باتری رو به پایه GND ماژول وصل میکنم و وقتی هم سر مثبت باتری رو به پایه +12 وصل میکنم جرقه میزنه و برد روشن نمیشه با اینکه چراغ برد سالمه و هیچ چیزی به ماژول هم وصل نیست و تمام جا آمپر ها وصله و باتری ۷ ولت که جریان زیادی هم نداره هروی گشتم دنبال اینکه اتصالی در مدار باشه پیدا نکردم دیگه نمیدانم چه کار کنم این برد هم از خود کافه ربات خریدم نمیدانم مشکل چیه ؟
با سلام، در صورتی که در مدت تست یک هفته خود هستید درخواست مرجوعی خود را ثبت بنمایید.
همچنین با استفاده از یک مولتی متر پایه های VCC و GND روی برد را بررسی بکنید که بهم اتصال کوتاه دارند یا خیر. در صورتی که داشته باشند احتمالا برد مشکل دارد.
با سیم جامپر دوسر نری آزدوینو رو به پین های ورودی وصل کردید ؟ من فقط دوسر نری داریم اما برای این قطعه سر مادگی میخاد من میتونم با همین سیم هایی که دارم درست کنم؟
با سلام
در این شرایط سمت برد درایور موتور را باید پین هایش را به پین هدر نری خود هویه بکنید. در غیر این صورت نیاز به تهیه سیم جامپر مادگی به مادگی یا مادگی به نری تهیه بکنید.