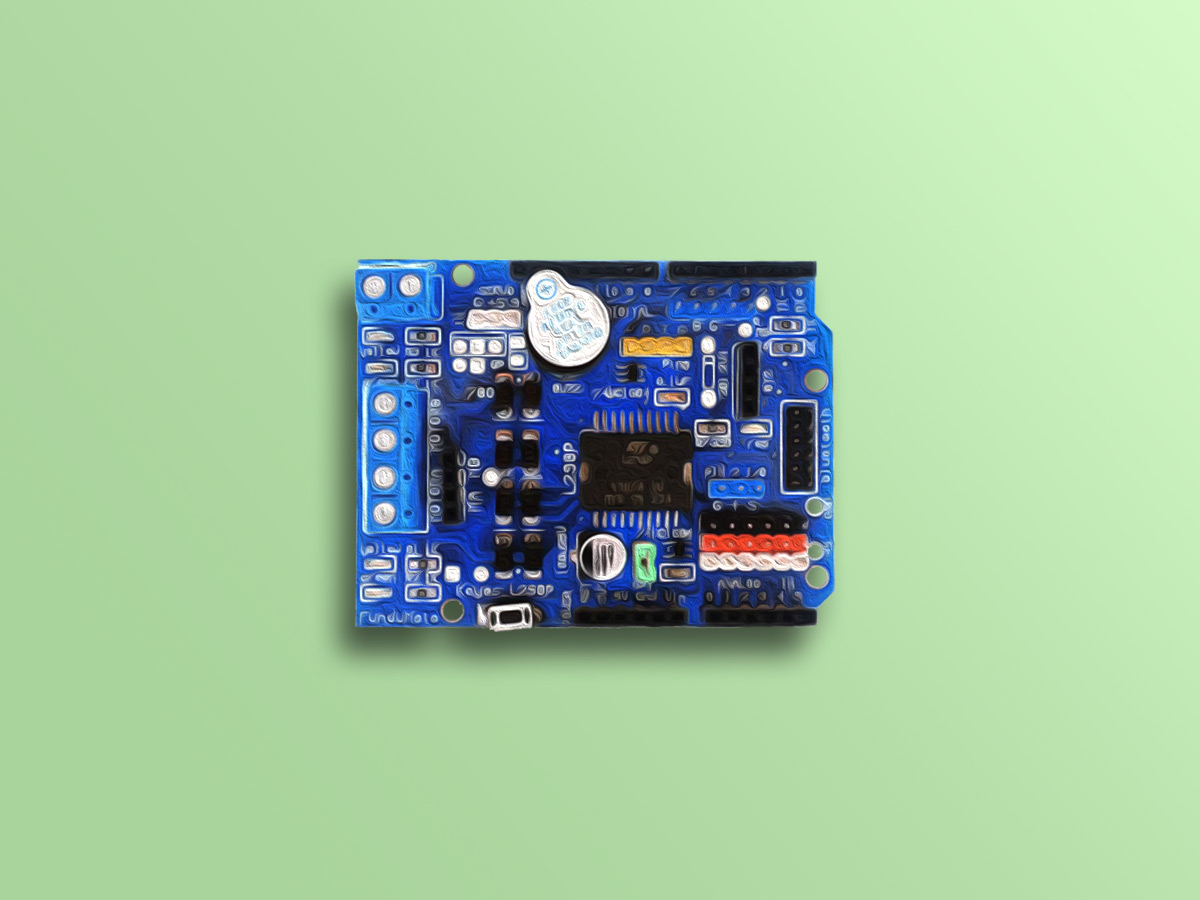
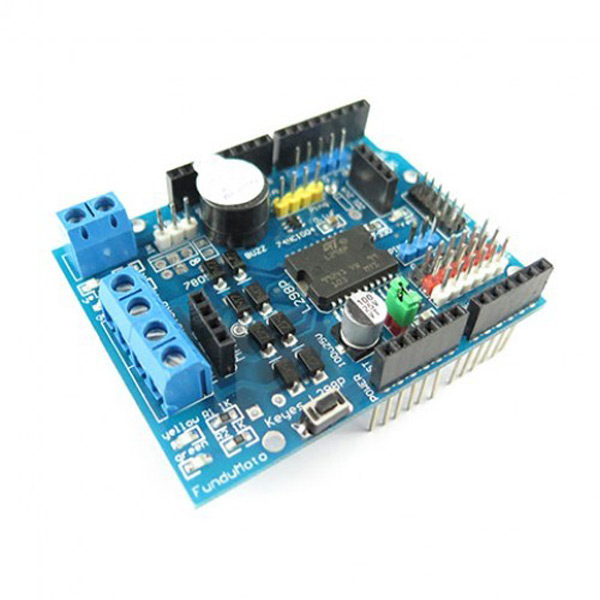
این شیلد موتور دارای بخشهای گوناگون جهت اتصال به قطعات مختلف میباشد. هر کدام به شرح زیر است:
اتصالات کنترل دو موتور DC:
- VMS: ولتاژ موتور
- GND: زمین
- MA1: سر مثبت موتور A
- MA2: سر منفی موتور A
- MB1: سر مثبت موتور B
- MB2: سر منفی موتور B
- PWMA: سیگنال کنترل سرعت موتور A- این پایه به پین 10 آردوینو متصل است.
- PWMB: سیگنال کنترل سرعت موتور B- این پایه به پین 11 آردوینو متصل است.
- ENA: سیگنال کنترلی موتور A- اگر HIGH باشد موتور در حالت مستقیم و اگر LOW باشد، موتور معکوس میچرخد.
این پایه به پین 12 آردوینو متصل است. - ENB: سیگنال کنترلی موتورB – اگر HIGH باشد موتور در حالت مستقیم و اگر LOW باشد، موتور معکوس میچرخد.
این پایه به پین 13 آردوینو متصل است.
بازر جهت تولید صدا:
- BUZ: پین بازر- این پایه به پین 4 آردوینو متصل است.
اتصالات جهت کنترل سروو موتور:
- SER: پایه PWM جهت کنترل سروو موتور- این پایه به پین 9 آردوینو متصل میشود.
اتصالات بلوتوث:
- BT2: پین های مخصوص بلوتوث شامل پایه های +(3.3 ولت)، -(GND)، RX(متصل به D0) و TX(متصل به D1)
اتصالات سنسور فاصلهسنج اولتراسونیک:
- ULT: پایههای اتصال به سنسور فاصلهسنج اولتراسونیک شامل +(5 ولت)، -(GND)، Return (متصل به D7) و Trigger (متصل به D8)
اتصالات برای RBG LED:
- RGB: مخصوص اتصال به RGB LED شامل پایههای B(متصل به D6) و G(متصل به D5) و R(متصل به D3)
دیگر اتصالات شیلد:
- A/D: پایه های آنالوگ و دیجیتال A0 تا A5 برای استفاده برای سنسورها و ماژولها
- D2: پایه دیجیتال 2 برای استفاده برای سنسورها و ماژولها
- RS: دکمه ریست
- GND: زمین
- Vcc: تغذیه برد- 3V و 5V
پین اوت (Pinout) شیلد را می توانید در تصویر زیر مشاهده کنید.