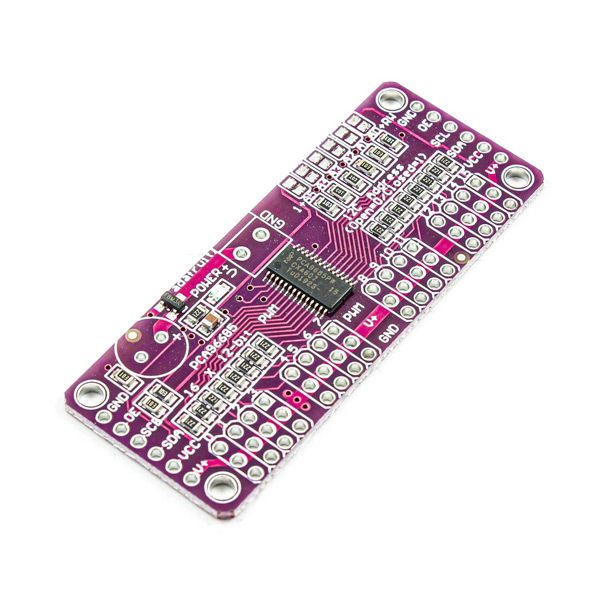
ماژول PCA9685 دارای 16 کانال PWM میباشد. این ماژول بسیار پرکاربرد بوده و زمانی که به تعداد زیادی پین خروجی PWM داریم، مورد استفاده قرار میگیرد. یکی از مهمترین کابردهای این ماژول کنترل سروو موتورها میباشد. با استفاده از این ماژول میتوانیم تعداد زیادی از سروو موتورها را به طور همزمان کنترل کنیم.
همانطور که گفته شد از درایور PCA9685 میتوان برای کنترل 16 سروو موتور استفاده کرد. در واقع این ماژول تنها با استفاده از 2 پین I2C میکروکنترلر این کار را انجام میدهد. در ضمن میتوان با اتصال 62 عدد از این درایور ها به هم، 992 عدد سروو موتور را تنها با استفاده از همان 2 پین میکروکنترلر کنترل کرد.
دیگر ویژگیهای این ماژول :
- فرکانس قابل تنظیم PWM تا حدود 1.6 کیلوهرتز
- رزولوشن 12-bit برای هر خروجی
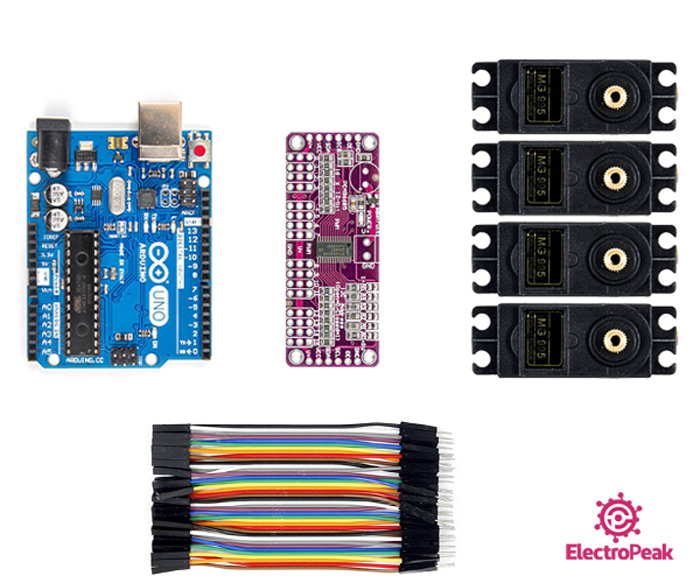
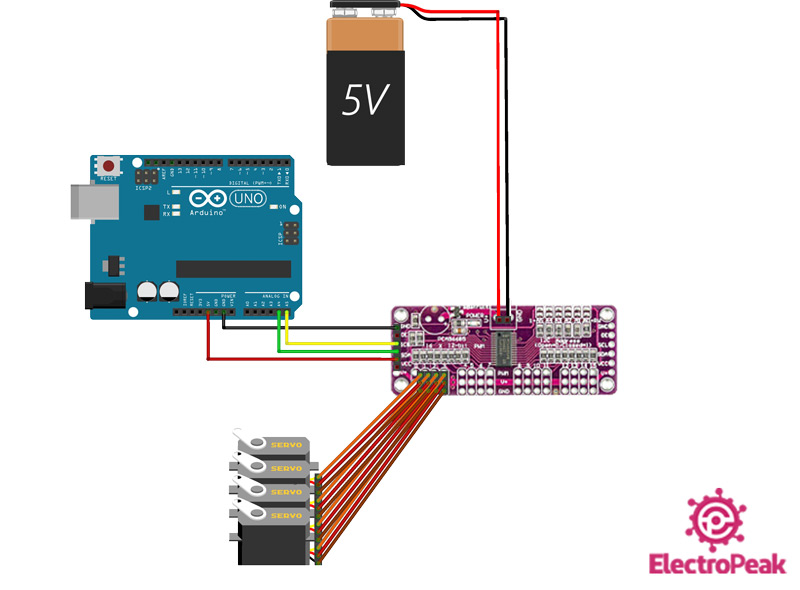
برای راهاندازی این ماژول از سروو موتور MG-995 استفاده میکنیم. ولتاژ اعمالی این موتور بایستی در بازه 4.8 تا 7.2 ولت باشد. فرکانس این موتور 50 هرتز بوده و دوره زمانی PWM آن 20 میلیثانیه میباشد. این موتور دارای 3 پایه به شرح زیر است:
- PWM: نارنجی
- VCC: قرمز
- GND: قهوهای