سنسور های زاویه با دارا بودن گوی های فلزی کوچک درون خود، لرزش ها را تشخیص میدهند. با استفاده از این ماژول میتوانید در صورت وجود لرزش، از سیگنال به وجود آمده برای ایجاد هشدار استفاده نمایید. خروجی این سنسور سیگنال دیجیتالی است. استفاده از این ماژول با آردوینو بسیار آسان بوده و میتوانید از آن برای تشخیص وجود لرزش استفاده نمایید.
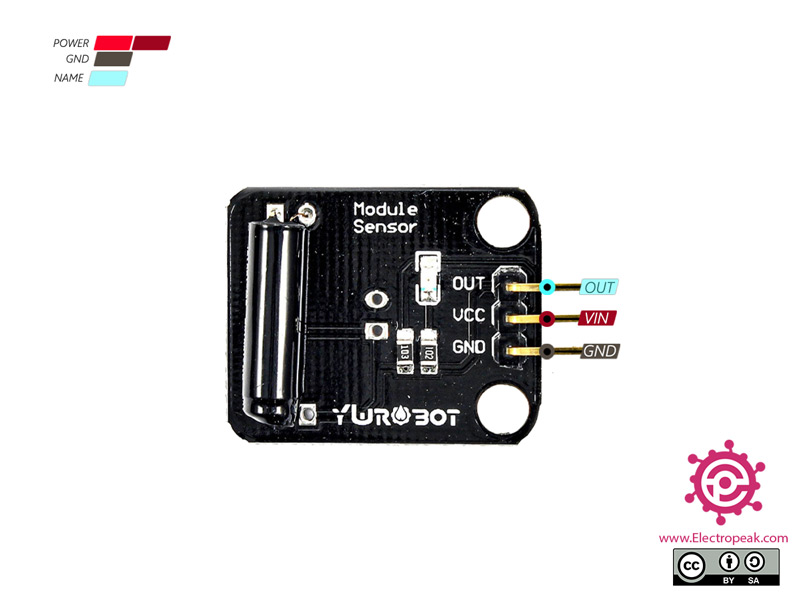
معرفی پایه ها (Pinout) سنسور لرزش YwRobot
ماژول سنسور لرزش YwRobot دارای 3 پایه به شرح زیر است:
5: تغذیه ماژول – 5 ولت
GND: زمین
OUT: خروجی
پین اوت (Pinout) این ماژول را می توانید در تصویر زیر مشاهده کنید.
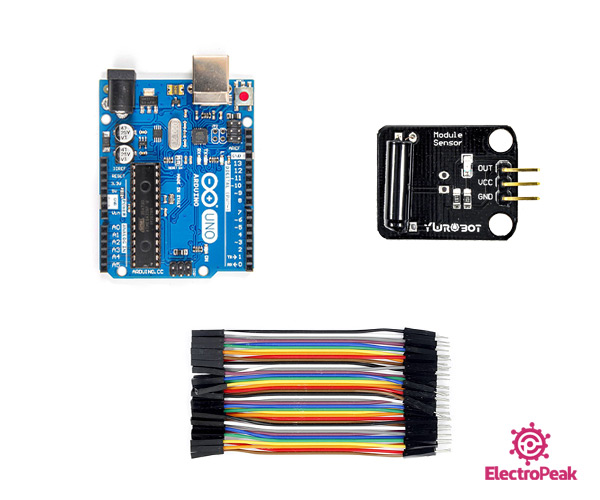
لوازمی که به آن احتیاج دارید
قطعات مورد نیاز
آردوینو UNO R3
×
1
سنسور لرزش YwRobot
×
1
سیم جامپر
×
1
نرم افزارهای مورد نیاز
آردوینو IDE
راه اندازی سنسور لرزش YwRobot با آردوینو
گام اول: سیم بندی
مطابق مدار زیر، ماژول را به آردوینو وصل کنید.
گام دوم: کد
کد زیر را روی برد آردوینوی خود آپلود کنید.
/*
modified on Sep 8, 2020
Modified by MohammedDamirchi from Arduino Examples
*/
// the setup routine runs once when you press reset:
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
// the loop routine runs over and over again forever:
void loop() {
// read the input on analog pin 0:
int sensorValue = analogRead(A0);
// print out the value you read:
Serial.println(sensorValue);
delay(100);
}
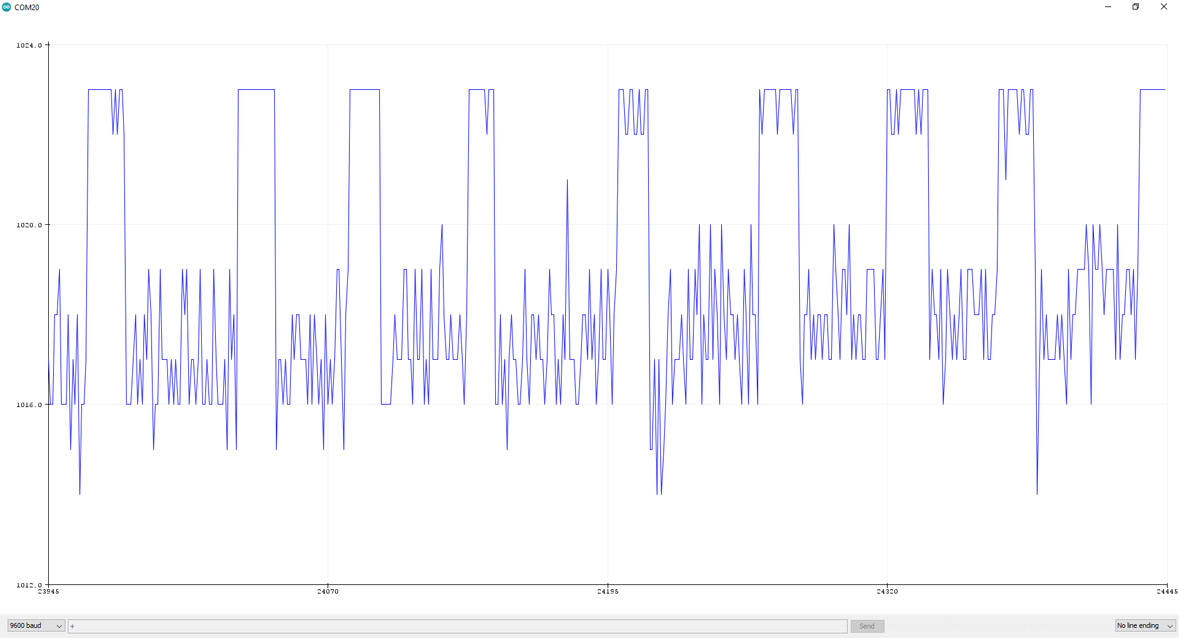
پس از آپلود کد سریال مانیتور دستگاه خود را باز کنید.