

برای استفاده از هر یک از سنسورهای ماژول GY-87 نیاز به استفاده از کتابخانه مربوطه آن دارید. کتابخانههای MPU6050 ،HMC5883L_Simple و BMP085 را از لینکهای زیر دانلود کنید.
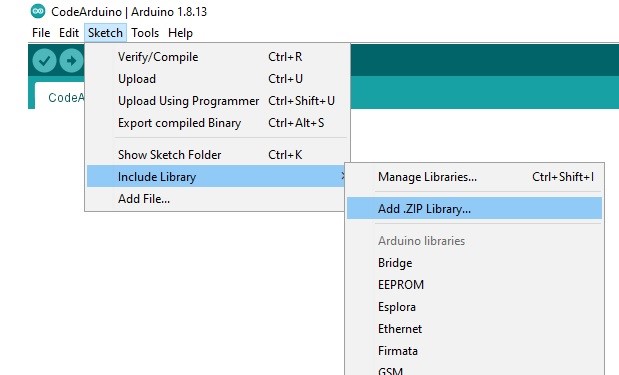
برای استفاده از هر یک از سنسورهای ماژول GY-87 نیاز به استفاده از کتابخانه مربوطه آن دارید. کتابخانههای MPU6050 ،HMC5883L_Simple و BMP085 را از لینکهای زیر دانلود کنید.
