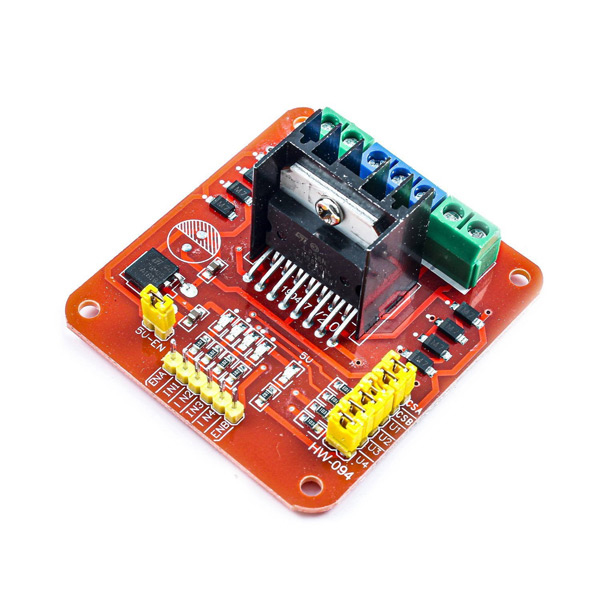
برای راه اندازی موتور های دی سی با جریان مصرفی کمتر از 2 آمپر، استفاده از آی سی درایور L298N گزینه مناسبی میباشد. ماژول L298N با مدار فیلتر مناسب و دسترسی به ورودی و خروجی ها توسط پین هدر و ترمینال، استفاده از این آی سی درایور را برای ما بسیار ساده تر کرده است.
L298N در واقع یک درایور فول بریج با دو نصفه پل (H-Bridges) است که امکان اتصال دو موتور دی سی را به صورت همزمان فراهم می کند.
توجه
در این ماژول به دلیل وجود 2 نصفه پل، امکان راه اندازی موتور های استپر نیز فراهم می باشد.
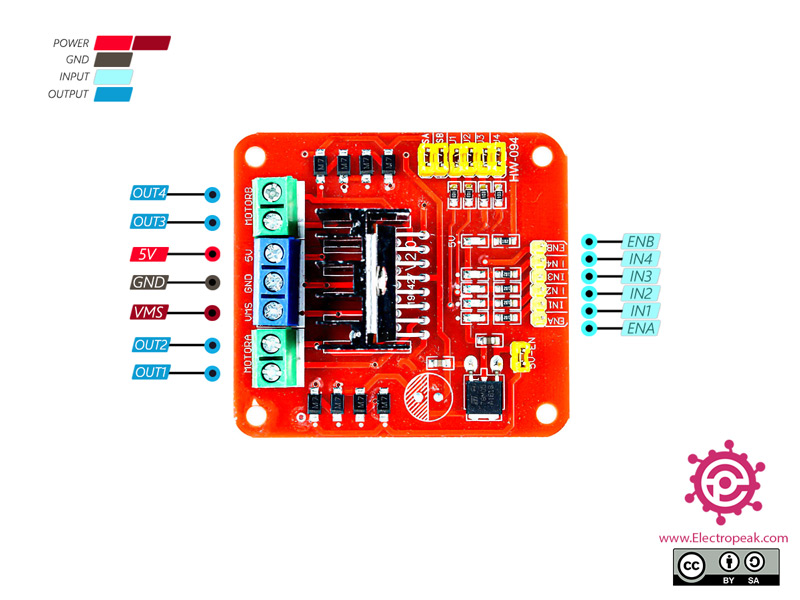
این درایور نیاز به یک منبع ولتاژ منطقی و یک منبع ولتاژ با جریان بالا برای تامین موتور ها دارد که در این ماژول با استفاده از یک رگولاتور 5 ولت مشکل تامین ولتاژ منطقی را حل کرده است. پین های کنترلی این ماژول با ولتاژ 5 ولت عمل می کنند. در زیر به برخی از ویژگی های ماژول اشاره شده است.
ماکزیمم ولتاژ عملیاتی : 46 ولت دی سی
ماکزیمم جریان خروجی : 2 آمپر (3 آمپر در پیک جریان)
توان : 25 وات
سطح ولتاژ ورودی ها : 5 ولت
دمای کاری : -25 تا 130 درجه سلسیوس
توجه
در صورت قرار گرفتن بار زیاد روی موتور، دمای درایور به سرعت بالا می رود و با توجه به این که دمای کاری L298N بین -25 تا 130 درجه سلسیوس است، می بایست امکان خنک شدن هیت سینک فراهم شود.
دیتاشیت تراشه L298N را می توانید از اینجا دانلود کنید.
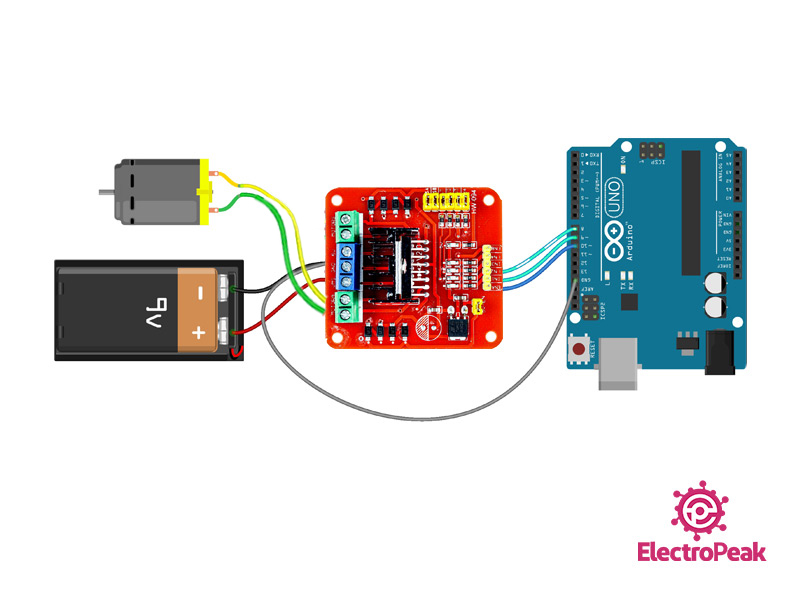
همانطور که در کد مشاهده می کنید موتور ابتدا 3 ثانیه در جهت جلو و 3 ثانیه در جهت عقب حرکت می کند. سپس موتور ایستاده و سرعت آن از 0 تا 100 درصد در جهت جلو با شتاب ثابت افزایش پیدا می کند و بعد همین حرکت موتور در جهت بر عکس انجام می شود.