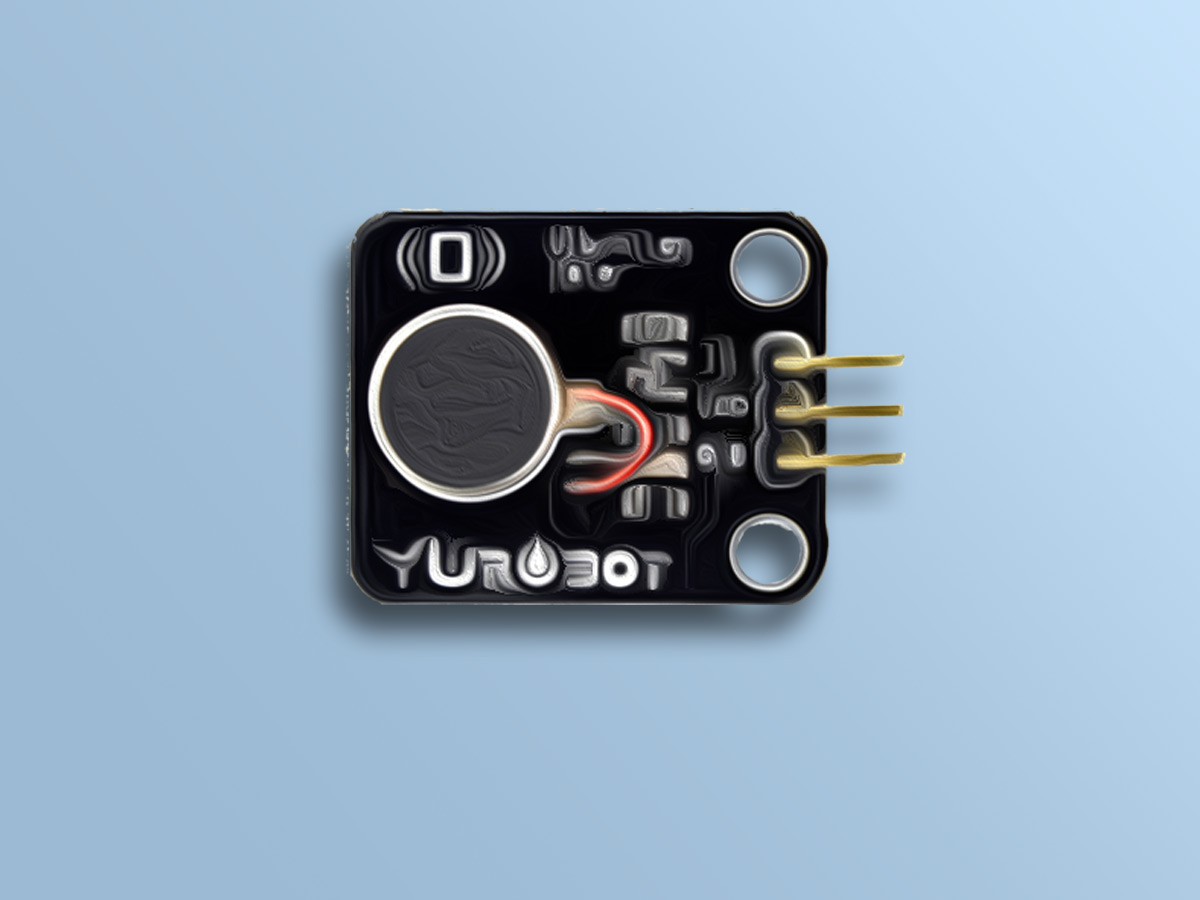
موتور ویبره وسیله ای برای ایجاد ارتعاش یا لرزش برای دستگاه های مختلف میباشد که انواع متفاوتی دارد. این ماژول کوچک، از یک موتور ویبره با کیفیت بالا استفاده میکند.با استفاده از موتور لرزش و ویبره YWROBOT، میتوانید به راحتی برخی پروژههای آردوینو مانند آلارم و رباتهای ویبره را به انجام برسانید. با افزایش ولتاژ ورودی، موتور مانند تلفن همراه شما ویبره خواهد کرد. شما میتوانید با استفاده از سیگنال دیجیتال یا PWM، شدت ویبره یا حالت خاموش و روشن شدن آن را کنترل کنید. این ماژول دارای یک نشانگر غیر شنیدنی است و شدت ویبره آن کاملا مشهود است. این ماژول به راحتی می تواند سیگنال الکتریکی را به ارتعاش مکانیکی تبدیل کند.
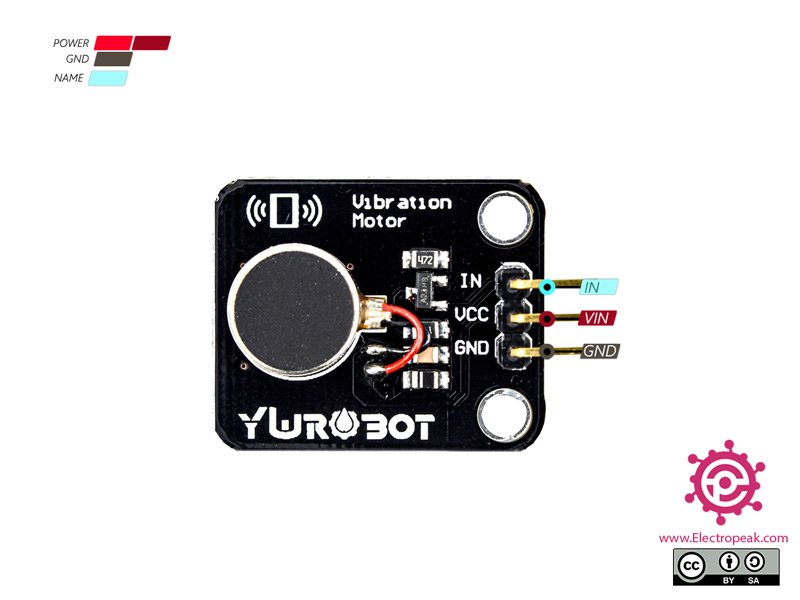
معرفی پایه ها (Pinout) موتور لرزش و ویبره YwRobot
ماژول موتور لرزش و ویبره YwRobot دارای 3 پایه به شرح زیر است:
VCC: تغذیه ماژول – 5 ولت
GND: زمین
IN: ورودی
پین اوت (Pinout) این ماژول را می توانید در تصویر زیر مشاهده کنید.
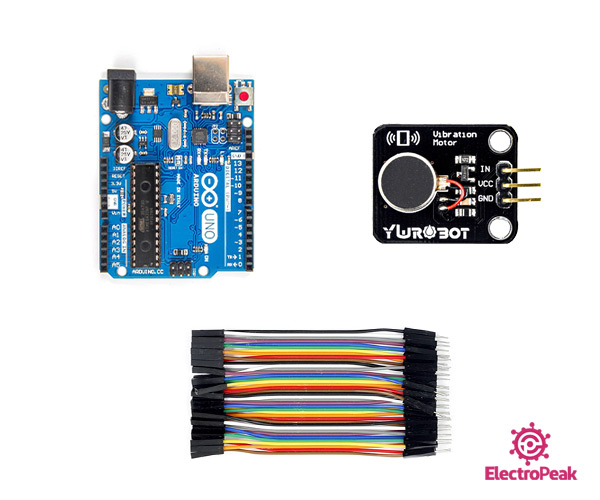
لوازمی که به آن احتیاج دارید
قطعات مورد نیاز
آردوینو UNO R3
×
1
لرزش و ویبرهYwRobot
×
1
سیم جامپر
×
1
نرم افزارهای مورد نیاز
آردوینو IDE
راه اندازی موتور لرزش و ویبره YwRobot با آردوینو
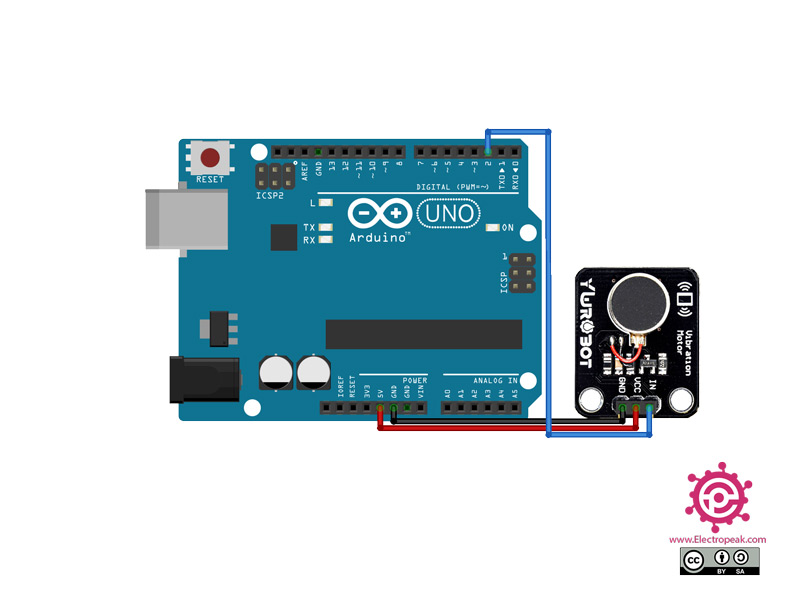
گام اول: سیم بندی
مطابق مدار زیر، ماژول را به آردوینو وصل کنید.
گام دوم: کد
کد زیر را روی برد آردوینوی خود آپلود کنید.
/*
modified on Sep 8, 2020
Modified by MohammedDamirchi from Arduino Examples
*/
// the setup routine runs once when you press reset:
void setup() {
pinMode(2, OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
digitalWrite(2, HIGH);
delay(500);
digitalWrite(2, LOW);
delay(1000);
}