
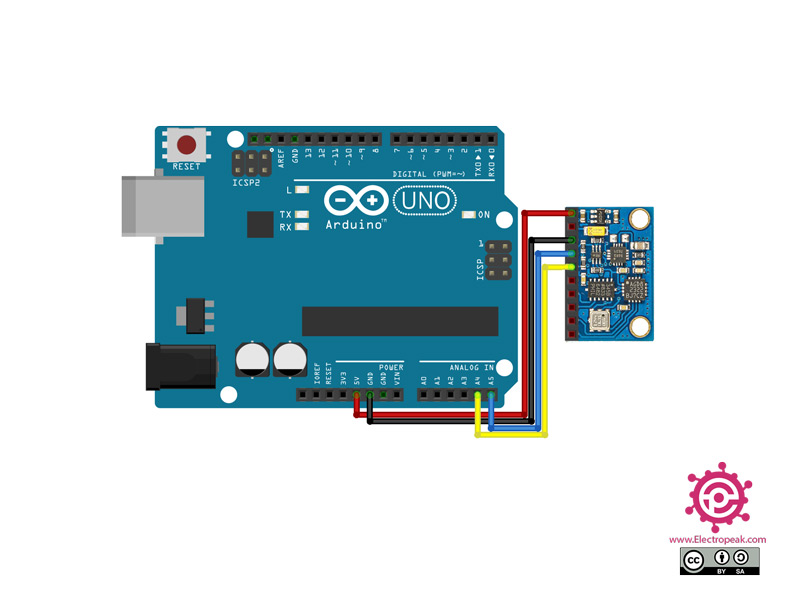
جهت دریافت دیتاشیت ماژول GY-801 اینجا کلیک کنید.
جهت دریافت دیتاشیت L3G4200D اینجا کلیک کنید.
جهت دریافت دیتاشیت ADXL345 اینجا کلیک کنید.
جهت دریافت دیتاشیت MMC5883MC اینجا کلیک کنید.
جهت دریافت دیتاشیت BMP180 اینجا کلیک کنید.
جهت دریافت دیتاشیت ماژول GY-801 اینجا کلیک کنید.
جهت دریافت دیتاشیت L3G4200D اینجا کلیک کنید.
جهت دریافت دیتاشیت ADXL345 اینجا کلیک کنید.
جهت دریافت دیتاشیت MMC5883MC اینجا کلیک کنید.
جهت دریافت دیتاشیت BMP180 اینجا کلیک کنید.

Comments (7)
سلام . موقع فروش ماژول نوشته شده بود که قطب نما ممکنه روی محصول MMCیا HMC باشه . چطور می تونم مطمئن شم کدوم چیپ روی ماژول هست تا از کتابخونه ش داخل برنامه استفاده کنم؟
سلام.
این دو IC بسیار مشابه هم هستند و کتابخونههایی که نوشته میشه برای جفتشون قابل استفادهان. در نتیجه نیازی نیست نگران نوع دقیق چیپ روی ماژول باشید.
سلام چطوری میتونم این رو روی esp32 اجرا کنم ؟
سلام
میشه از این مجموعه بعنوان اتوپایلوت و رکوردر حالتهای پرواز استفاده کرد ؟
با سلام
اتوپایلت یک میکروکنترلر می باشد که پردازش های مورد نظر را اجرا می کند، این ماژول در کنار اتوپایلت قرار میگیرد و دیتا مورد نیاز جهت تنظیم تعادل را به اتوپایلت میدهد. برای اطلاعات بیشتر برای اتوپایلت های سری آردوینو می توانید به سایت multiwii مراجعه کنید
سلام محمدآقا خوبین
من میخوام با جی وای 801 و آردینیو سیستمی درست کنم که روی هواپیما نصب بشه و حالتهای پرواز رو ثبت و ضبط کنه یعنی رکورد کنه
سوال 1 با کدوم مدل آردینیو این ماژول بهتر مچ میشه
2_ چه ماژول دیگری نیاز هست برای ریکورد اظلاعات
و اینها رو از کجا بخرم ؟
ممنون
09011229780 لفا پیام بدین تماس میگیرم
با سلام
هیچ تفاوتی بین کدام نسخه آردوینو یا میکروکنترلر های دیگر برای ذخیره سازی داده ندارد.
برای ذخیره سازی حالت های پرواز که داشته اید اکثر اتوپایلت ها این کار را انجام میدهند، در هر صورت این کار انجام نشود می توانید از هر مدل میکروکنتلر به همراه یک ماژول SD یا MicroSD که یک حافظه رم را به آن اضافه کنید و دیتا های مورد نظر را در آن ذخیره کنید و سپس در برنامه اکسل به پردازش داده های خود بپردازید.
پیشنهاد میکنم مابین داده های خود از , یا هر کارکتر خاصل دیگری استفاده کنید و آخر هر لاین با اینتر به خط بعدی بروید و بر روی حافظه ذخیره کنید. چون به این صورت شما میتوانید فایل را به فرمت csv تغییر بدهید و در اکسل باز کنید.